
6.1 밀리와 무어 모델
순서회로 모델은 조합논리와 메모리를 포함.
[밀리 순서회로 모델]
[무어 순서회로 모델]

6.2 상태기계 설명
- 입력변수 : 순차기계 외부에서 들어오는 모든 변수.
- 출력변수 : 순차기계를 나가는 모든 변수.
- 상태변수 : 메모리 출력 (플립플롭)은 순차기계의
상태를 정의. 디코더된 상태변수
(밀리 기계에 대해서는 입력변수 포함)는 출력변수를 생성.
- 여기변수 : 메모리(플립플롭)에의 입력.(변수가 메모리를
변화하도록 여기)
플립플롭이 시스템의 메모리로 사용될 때 여기변수는 플립플롭(J-K, R-S,D,T)의
입력. 상태변수는 여기변수의 함수. 상태변수와 입력변수에 따라 동작하는 입력
조합논리에 의하여 생성.
- 상태 : 메모리의 내용에 의하여 정의. 플립플롭 Q의 출력에 의하여 정의.
[상태변수와 상태]
2의 x승 = y
x = 상태변수의 개수 (플립플롭의 개수)
y = 가능한 최대 상태의 개수 (예 : 4개의 상태변수는 최대 16개의 상태.)
6.2.1 현재상태, 차기상태
- 상태변수 X는 클럭이 도착하기 이전 Xt로 표시
- 동기 클럭이 도달한 후 Xt+1로 표시.
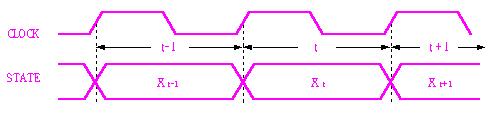
[현재상태]
- 다음 클럭 에지가 들어오기 이전에 어떤 시각 t에서의 모든 상태변수의 상태.
- 현재상태는 시간에 대한 기준점.
[차기상태]
- 시각 t 1에서의 모든 상태변수의 상태.
- 순차기계: 특별한 클럭 t가 들어온 후 메모리 상태에 의하여 표현.
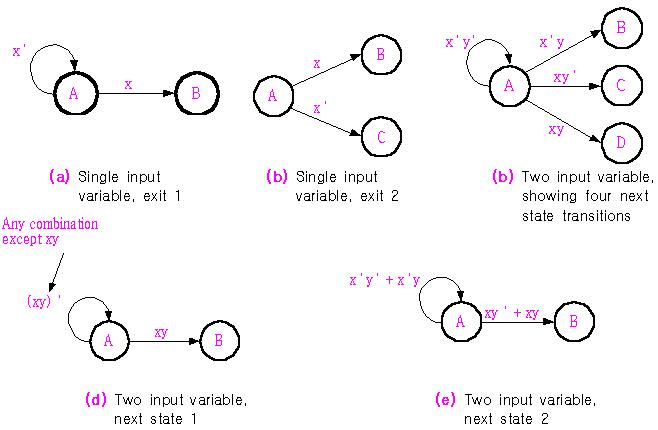
6.2.2 상태도(State Diagram)
- 순서회로의 그래픽 표현
- 각 상태는 내부에 위치한 심볼을 나타내기 위해 원으로 표시.
- 호(Arc) : 한 상태에서 차기상태로의 변화.
- 입력조건 : 원호 주위에 표시.
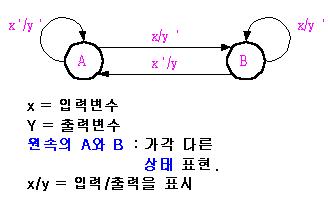
[밀리 상태 표시 예제]
[밀리기계]
화살표 : 상태 A와 상태 B 연결.
차기상태 : 입력변수 x에 따라 A 혹은 B가 될 수 있음.
입력변수 x = 0 상태 A로
x = 1 상태 B로 전이.
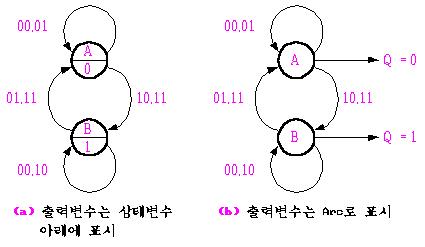
[J-K 플립플롭의 무어 회로 표시]
[무어
기계 (출력은 현재상태에 의해서만 좌우)]
상태를 표시하는 원 내부에 출력변수 기입 혹은 화살표 끝에 출력값 표현.
J-K 플립플롭의 모델링.
"셋(1)" 혹은 "리셋(0)"은 플립플롭 상태.
상태 A는 Q 0일 때의 경우, 상태 B는 Q 1인 경우.
상태 A에 있을 때 : JK 00이면 상태 A에 남아 있고 Q
0.
JK = 10이면 상태 B로 전이, 출력 Q=1.
JK = 10 혹은 11일 때 상태 A로부터 상태 B로 전이.
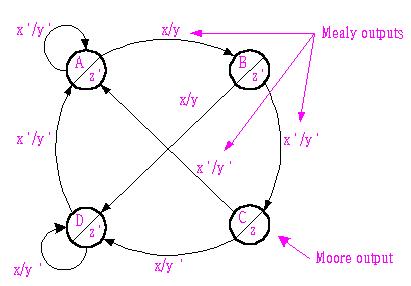
[밀리와 무어의 혼합 상태 표시 다이어그램]
-
2개의 상태변수(2개의 플립플롭)를 필요로 하는 4개의 상태 A, B, C, D.
⊙ 하나의 입력변수 x, 2개의 출력변수 y (밀리 표현) 및 z (무어 표현).
⊙ 기계가 상태 A 혹은 B 및 입력변수 x가 인가될 때 출력 y는 True.
⊙ 출력변수 z는 입력변수 x에 무관하게 기계가 상태 C에 있을 때만 인가.
1. 상태 A에서 x=0이면 기계는 상태 A에 남고(y 및 z는 0).
2. x=1 (인가)이면 다음 클럭 에지에서 상태 A로부터 상태 B로의 전이,
출력 y =1(인가).
3. 상태 B에서 x 0이면 상태 C로[출력 z=1 (인가)], x
1이면 상태 D(출력 y=1)
로 전이. 출력 z는 상태 C로부터 유도되며 x와 무관.
4. 상태 C에서 x 1일 때 상태 D로 전이, x 0일 때
상태 A로 .
상태 C에 있을 때 출력 z=1. 다음 클럭 에지때 상태 전이가 일어나서
출력 z는 0.
5. 상태 D에서 가능한 차기상태는 D 혹은 A로 x 1이면 D이며 x
0이면 A.
두 경우 모두 출력 y=0.
[여러경우의 부분적인 상태도]
6.3 동기 순서회로의 분석
6.3.1 분석 원리
[분석 과정]
1) 시스템 변수인 입력, 상태,
출력 결정.
2) 논리도에서 변수가 불분명하면
변수명 명명.
3) 플립플롭 형태 결정. 필요
특성 방정식 기록. 다른 특성 방정식을 가질 수 있다.
4) 논리도에서 여기 방정식
도출.
5) 플립플롭 특성 방정식과
회로의 여기 방정식을 사용하여 상태변수에 대한 다음 시간에
대한 상태 방정식, 여기 방정식으로부터 여기표 구성.
6) 입력변수 방정식 유도.
밀리 or 무어 기계?
7) 천이표 작성.
8) 심볼을 상태에 부여, 상태
표 혹은 상태도 구성.
9) 타이밍도 작성.
6.4 상태도의 구성
순서회로의 설계에서 상태도의 구성이 중요
6.4.1 업-다운 카운터(Up-down Conter)
[예제 6.3]
■ 동기 10진 카운터에 대한 상태도 구성.
- 제어 입력
M = 0 : Count Up ( 0, 1, ---- 9)
M = 1 : Count Down (9, 8, ---- 0)
- y는 만약 카운터
업으로 최종 카운터에 도달되면 카운터 출력은 1, 카운터 다운이면
최종 카운터일 때 다른 출력 z는 1.
■ 문제로부터 10개 상태 필요, 카운터는 동기(클럭과 동기)
1. 10개 상태 심볼(0에서부터
9까지 기입).
2. 모드 제어 값 결정[M
= 0 : count up, M = 1 : count down).
3. M의 값에 따라 차기상태
표시(각 상태 심볼을 화살표).
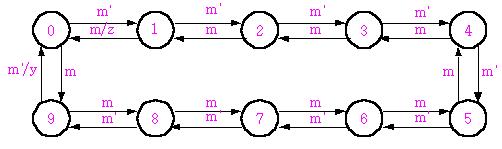
-
상태도는 2개의 출력변수가 모드 입력과 현재상태에 따라 다르기 때문에 밀리
기계.
6.5 카운터 설계
순차 카운터를 설계 방법.
6.5.1 Modulo-8 동기 카운터
J-K 플립플롭을 이용한 순차 모듈로-8 동기 2진 카운터 설계.
8개의 상태.
1. 모듈로-8 카운터에
대한 상태도 구성. (그림 6.29 참조)
2. 상태 표 완성. (표
6.18)
3. 8개의 상태. 각각은
3개의 상태변수 필요.
