La aplicación del manejo
de materiales es con lo cual es robot mueve el material o partes desde
una ubicación y orientación a otra. Para realizar el traslado,
el robot es equipado con un gripper (pinzas) de tipo de efector final.
Los gripper deben diseñarse para manejar la parte o partes específicas
para ser movidas en la aplicación. Los siguientes casos están
Incluidos dentro de esta categoría:
1. Traslado de material
2. Máquina cargando y / o descargando.
En aproximadamente todas las aplicaciones de manejo de material, las partes deben estar presente al robot en una orientación y posición conocida. Esto requiere algún dispositivo que maneje el material para entregar las partes en la célula de trabajo, definiendo su posición y orientación. Los futuros robots, equipados con sensores apropiados, pueden ser capaces de repartir aleatoriamente en la célula, pero esto no es común en aplicaciones actualmente.
Traslado de material.
Estas aplicaciones son el principal
propósito primario del robot y es tomar partes de una ubicación
y colocarlos a una nueva ubicación. En muchos casos, una reorientación
de la parte que se desea en la reubicación. La aplicación
básica en esta categoría es relativamente la simple operación
de tomar y colocar, donde el robot recobra una parte y deposita en una
nueva ubicación. Transferir las partes desde un transportador
a otro es un ejemplo. Los requerimientos de la aplicación
son modestos; baja tecnología del robot, (por ejemplo tipo limitado
de secuencia.) es generalmente suficiente. Solamente dos, tres, o
cuatro de articulaciones se requieren para la mayoría de las aplicaciones.
Robots de fuerza neumática se usan frecuentemente.
Un más ejemplo complejo
de traslado material por medio de plataformas. Estas son las aplicaciones
en que el robot deben recobrar partes o los otros objetos desde una de
ubicación (por ejemplo., una posición sobre un transportador)
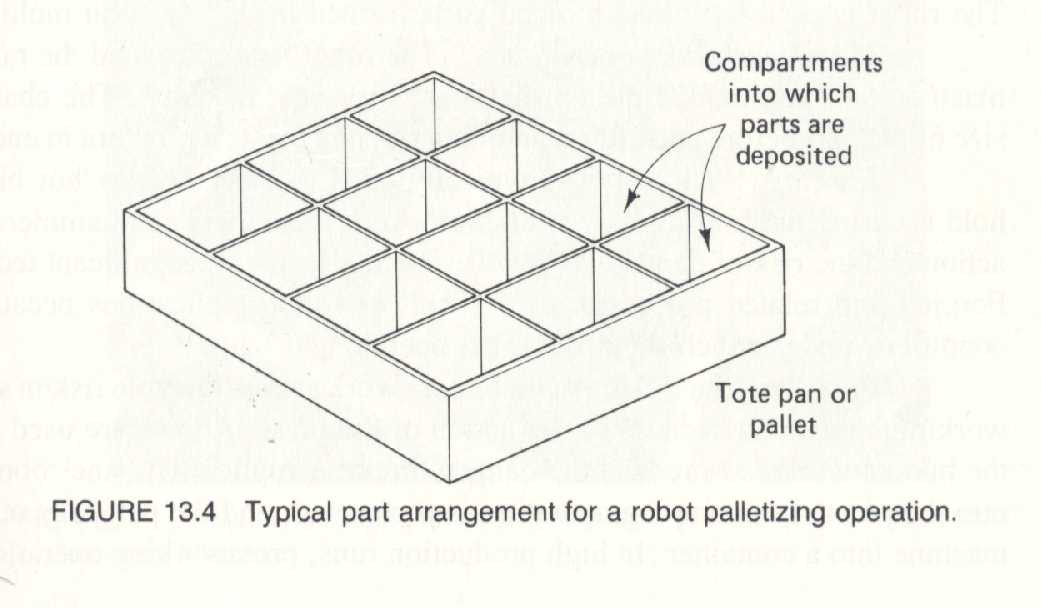
y los depositan en una paleta u otro recipiente de manera ordenada.
Un arreglo típico de paleta se ilustra en la Figura 13.4.
Aunque el punto donde se recoge la paleta sea el mismo para cada
ciclo, la ubicación del depósito es diferente para cada parte.
Esto agrega un grado de dificultad a la tarea. O al robot debe enseñársele
cada posición en la paleta que usa el método de poder
leadthrough, o esta debe computar la ubicación basada en las
dimensiones de la paleta y las distancias de centro entre las partes (en
ambas direcciones, X y Y ). Para paletas que retienen muchas partes,
el método de leadthrough programador puede ser laborioso.
Otras aplicaciones que son similares a paletizar incluyen despaletizar (quitando partes desde un lugar en donde están en orden y los ponga a una ubicación específica), amontonando operaciones (colocando en una superficie plana articulo por articulo, separa en lo alto del uno al otro, tal que la ubicación vertical disminuye de posición continuamente cambiando con cada ciclo), y operaciones de inserción (donde el robot coloca partes en los compartimentos de un cartón dividido).
Máquina cargando y / o descargando.
La aplicación de una
máquina cargando y / o descargando en un desembarque, el robot transfiere
partes en y / o desde una máquina de producción.
Los tres casos posibles son:
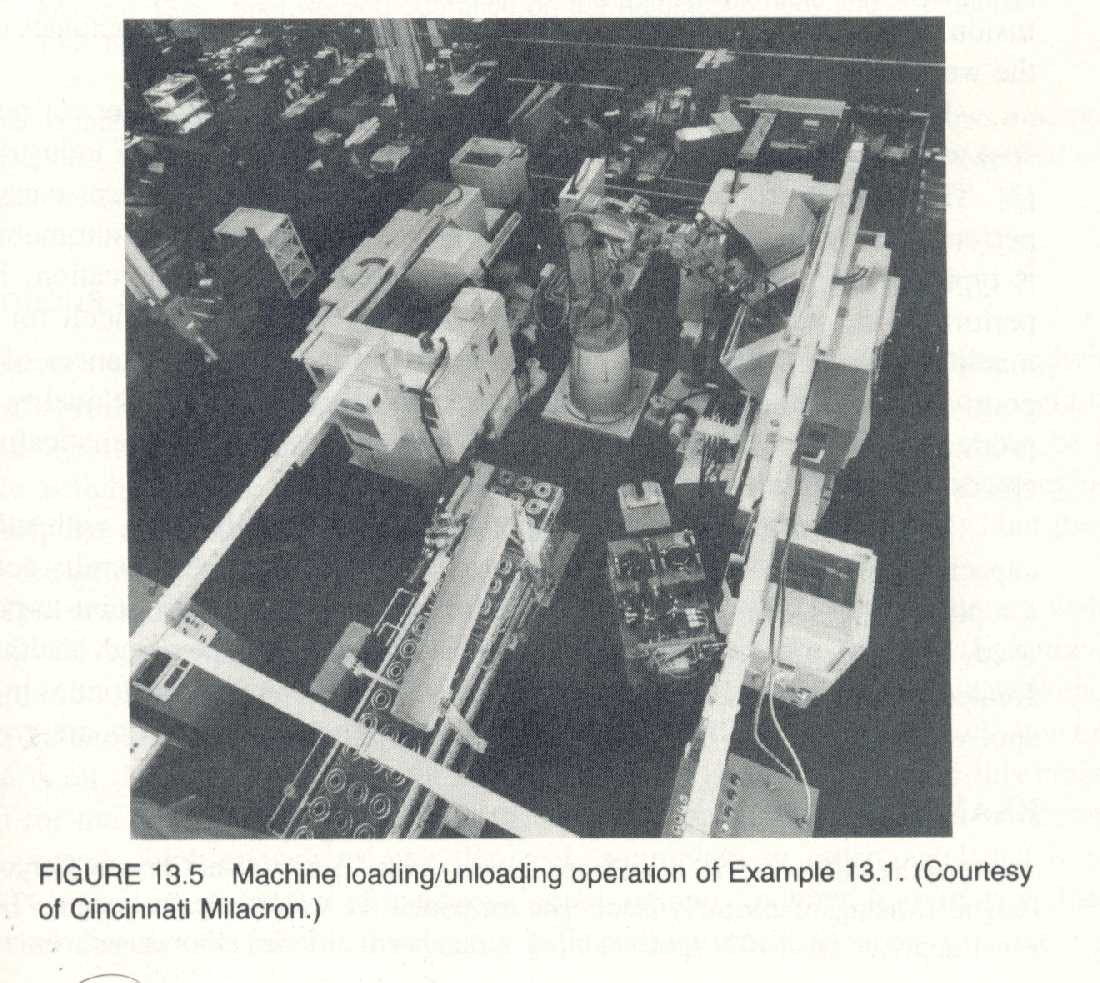
EL EJEMPLO 13.1
La figura 13.5 muestra una vista superior de una célula de robot en que las partes se cargan y descargan a dos centros volviendo. La célula también incluye una estación automática amordazando. Las partes se entregan a las células de trabajo en paletas sobre un transportador. Un Cincinnati Milacron de robot recobra partes desde el transportador y los carga primero en la primera máquina y luego en la segunda máquina. Entre las dos máquinas y después de la segunda máquina, las partes se registran a la estación para amordazarlas. La carga y descarga de los centros de vuelta esta hecho desde la retaguardia, mejor que enfrente de las máquinas. Esto permite acezar a los operadores enfrente de las herramientas de la máquina.