Como se indico en el Capítulo 12, las aplicaciones industriales del robot comúnmente involucran varias piezas del hardware en adicción al robot Estos otros componentes del hardware incluye transportadores, paletas, herramientas de trabajo, mezclas, y otras. En algunas aplicaciones, varios robots deben integrarse en una célula sencilla de trabajo, es importante que el equipo en la célula este organizado en un esquema eficiente. Hay tres tipos básicos de célula de trabajo de esquema:
1. El robot centrado en la célula
de trabajo.
2. Robot en célula de trabajo
en línea.
3. Célula de trabajo móvil de
robot
1.-El robot se ubica en el centro aproximado de las células de trabajo y las otras piezas des equipo se arreglan alrededor. El esquema se ilustra en la Figura 13. 1. Este tipo del esquema de célula favorece a las instalaciones en que hay un robot único que atiende uno o más máquinas de producción. Máquinas cargando y descargando son ejemplos de aplicaciones de desembarque.
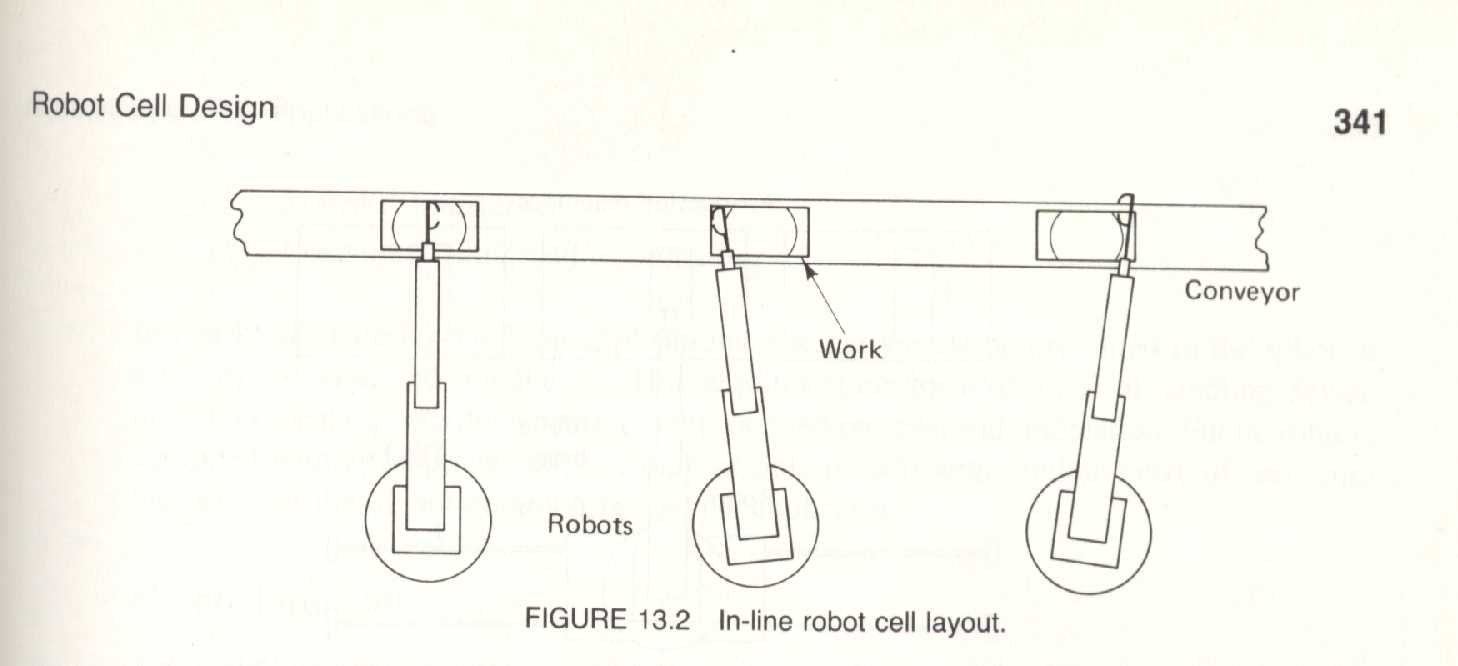
2.-Es un arreglo en que uno o más robots se ubican a lo largo de una línea de transportador u otro sistema de material de transporte. El trabajo es organizado para que las partes sean presentadas a los robots por el sistema de transporte, y cada robot desempeña alguna operación de asamblea o procesamiento sobre cada parte. El arreglo se muestra en la Figura 13.2. Como se indica en el diagrama, hay robots comúnmente múltiples en este esquema de célula. Este se caracteriza por las líneas soldadoras usadas para soldadura de cuerpos de automóvil en la industria automotriz.
Cualquier de los diversos
tipos de partes de trabajo de los sistemas de transporte, se describen
en el Capítulo 4 (por ejemplo, continuo, intermitente, y asíncrono)
pueden usarse para mover las partes a lo largo de la línea.
El tipo más común es el sistema intermitente de traslado.
Este presenta la parte al robot en una orientación y ubicación
precisa a intervalos regulares de tiempo. El sistema asíncrono
ofrece el mismo aspecto de orientación y posición, pero la
duración varía según los requerimientos del tiempo
de ciclo de cada estación.
El beneficio del sistema
asíncrono de traslado es que permite que cada robot trabaje independientemente
por proveer una fila de partes de trabajo para acumularlas enfrente de
cada estación de trabajo. Si un robot se estropea y la avería
puede repararse en un tiempo relativamente corto, el resto de la línea
puede continuar operando.
El sistema continuo de
traslado presenta problemas especiales para el robot porque las partes
no son retenidas estacionariamente durante el procesamiento.
A la vez, el robot debe
desarrollar en su ciclo de trabajo como se mueven las partes después
de pasar sobre el transportador. Esto requiere que el robot sea capaz
de investigar como la parte se mueve a lo largo de la línea.
El término que investiga los medios en que el robot debe mantener.
la posición y orientación de su efecto final durante la relación
del ciclo de trabajo con el movimiento de la pieza es mejor que la relación
de arreglar algo coordinado con el sistema. El robot que investiga de las
partes es acoplado o se esta moviendo al robot a lo largo de una trayectoria
que es el paralelo a (y a la misma velocidad como) el transportador durante
el proceso, o por dotar el robot con suficiente capacidad computacional
para ajustar continuamente su brazo y muñeca juntas para mantener
una orientación fija con la parte como esta se mueve. Los sensores
son requeridos continuamente para identificar la posición de la
parte y transmitir estos datos al controlador del robot a fin de mantener
la relación de posición requerida.
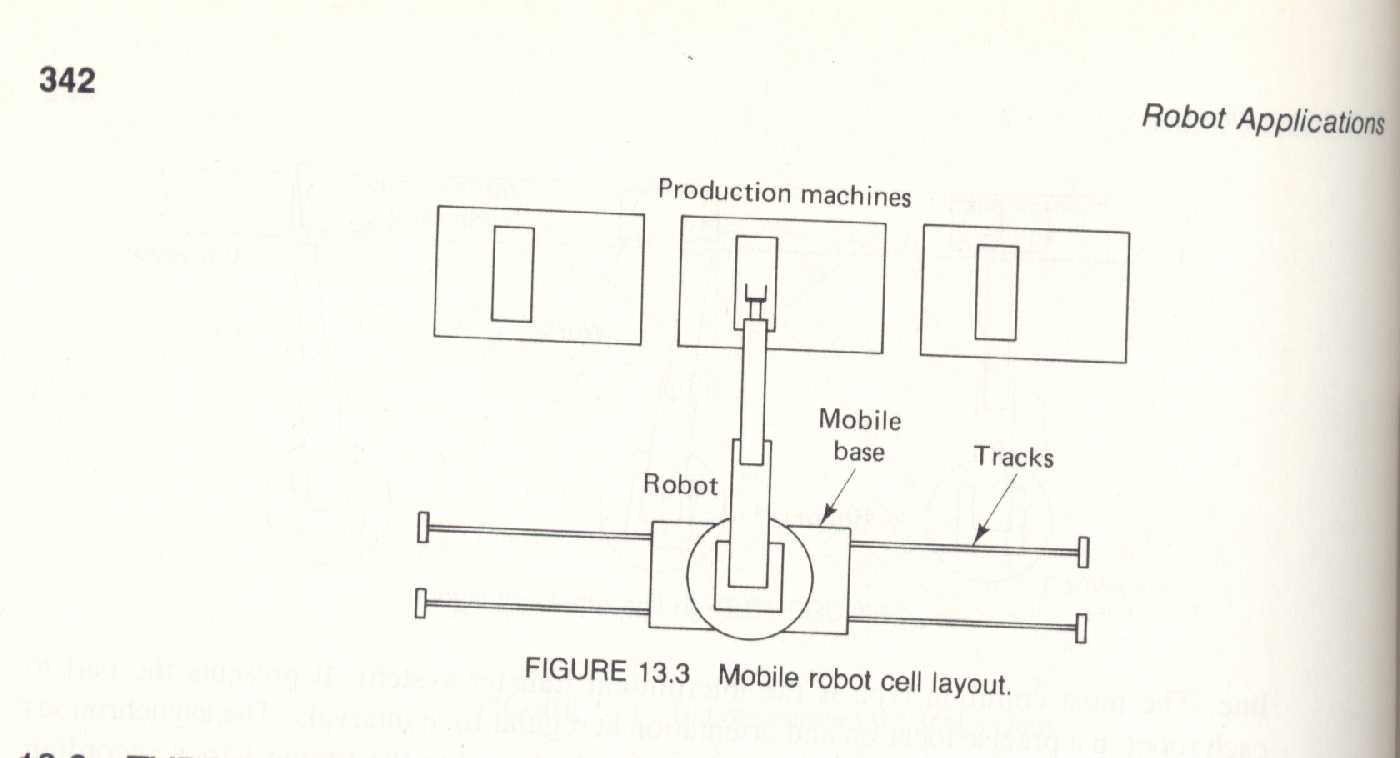
3.- Una posible conceptualización de este esquema de célula está presente en la Figura 13.3. En este arreglo, el robot se provee con medios siendo transportados dentro de la célula desarrollando diversas tareas a ubicaciones diferentes. El mecanismo de transporte consiste en un piso montado o sistema superior de carril que permite al robot ser movido a lo largo de una trayectoria lineal. La célula móvil de robot es apropiada en instalaciones donde el robot debe atender más de una de estación de trabajo (por ejemplo, una producción de maquinaría), y las estaciones de trabajo no pueden ubicarse alrededor del robot en un robot. Una razón posible es por qué el robot tendría que reubicarse por sí mismo en las estaciones de trabajo que son separadas geográficamente por distancias mayores a la capacidad de alcance des robot.