El proceso de las aplicaciones son esas en que el robot desempeña una operación de proceso sobre la parte. Una característica distintiva de esta categoría es que el robot se equipa con algún tipo de herramienta como su efector. Para desarrollar el proceso, el robot debe manipularse la herramienta relacionada a la parte durante el ciclo de trabajo. En algunos procesos de aplicaciones, más de una herramienta debe usarse durante el ciclo de trabajo. En estos ejemplos, o un gripper o un mecanismo rápido de cambio se usa para cambiar las herramientas durante el ciclo de trabajo.
Los ejemplos de aplicaciones industriales de robot en la categoría proceso incluye la soldadura de mancha, arco continuo de soldadura, la pintura de spray, diversos maquinados y rótulos.
Soldadura de mancha.
La soldadura de mancha es un
metal que une el proceso en que dos partes de hoja metal se fusionan juntas
a puntos localizados de contacto. Dos electrodos de cobre se usan
para apretar el metal separa junto y aplica gran corriente eléctrica
a través del punto de contacto para ocasionar la fusión.
Los electrodos, junto con el mecanismo que los activa, constituye
la pistola soldadora en la soldadura de mancha.
A causa de su uso generalizado
en la industria automotriz para la fabricación del cuerpo
de automóvil, la soldadura de mancha representa uno de las
más importantes aplicaciones de robots industriales en la actualidad.
El efector es la pistola soldadora de mancha usado para pellizcar los paneles
juntos del automóvil y desempeñan la resistencia
del proceso de soldadura. La pistola soldadora es usada para la soldadura
de mancha de automóviles que generalmente es muy pesada. Con
anterioridad al uso de robots en esta aplicación, los trabajadores
desarrollaban la operación, y las herramientas para soldar eran
pesadas y difíciles para los trabajadores al manipularse exactamente.
Como consecuencia, había partes en las que no se soldaba bien, mal
ubicadas y otros defectos, dando como resultado una baja calidad
en el acabado del producto. El uso de robots industriales, con esta
aplicación ha mejorado dramáticamente la consistencia con
la que las soldaduras se han hecho.
Los tipos de robots usados para la soldadura
de mancha son comúnmente grandes, con la capacidad suficiente de
carga útil para esgrimir el revólver pesado de soldadura.
Cinco o seis ejes se necesitan generalmente para lograr la
ubicación y orientación requeridos. Los robots de reproducción
con el punto - a - punto de control se usan, y la programación se
realiza usando el Método de poder de leadthrough. La unión
del brazo y polar coordinado en los robots son las anatomías más
comunes en la soldadura de mancha de automóvil que solda líneas.
En lay outs de célula de robot en línea tienen de 20
a 30 robots.
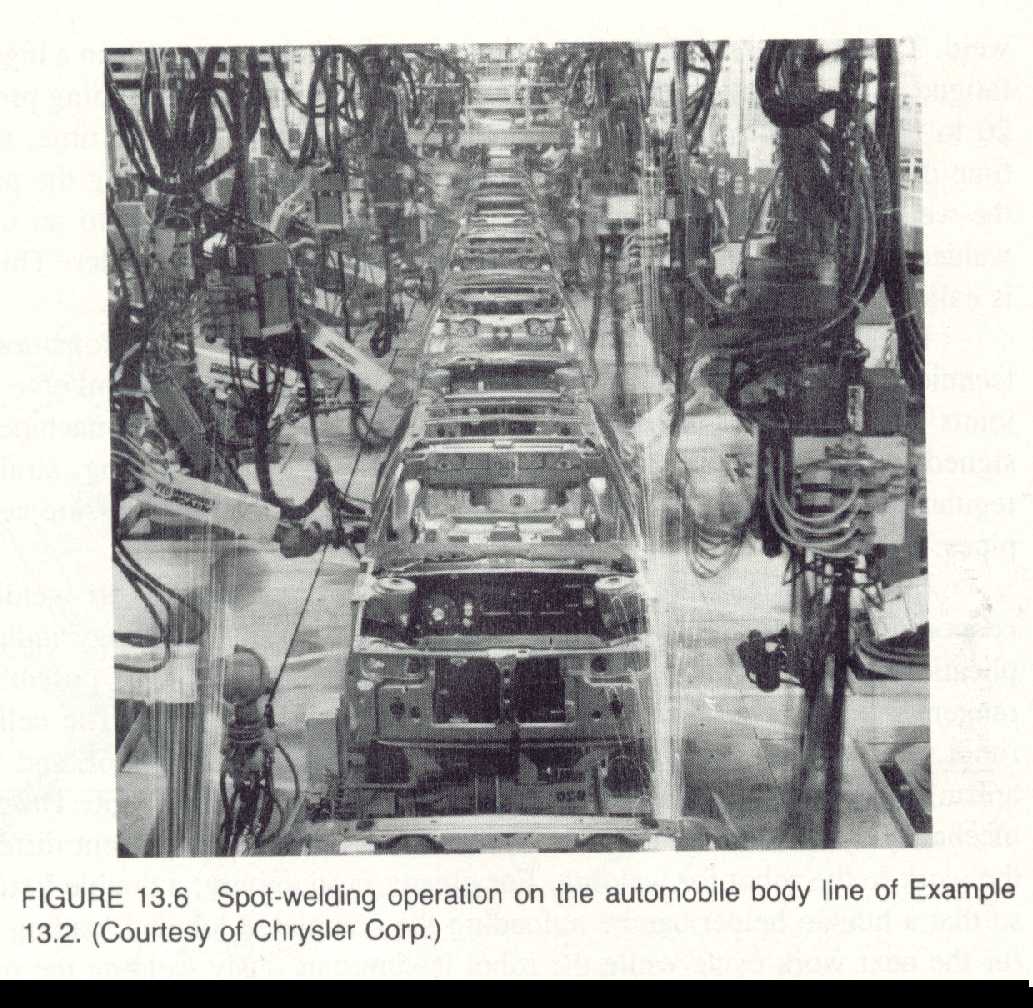
EL EJEMPLO 13.2
El Chrysler LeBaron GTS and Dodge Lancer son modelos hechos por Chrysler Corporations Sterling Heights (Michigan) planta ensambladora. Los cuerpos del automóvil son soldados juntos usando 99 robots industriales que aplican un total de 1021 soldadura de macha. [41. Un número de fabricantes diferentes de robot es representado en la planta, incluyendo Cincinnati Milacron, Prab, y Unimation. La figura 13.6 muestra una porción de la línea, donde 56 Cincinnati Milacron T3-776 de robots desarrollan aproximadamente 900 de machas de soldaduras del automóvil.
Soldadura continua de arco.
La soldadura continua de arco
se usa para proveer articulaciones soldadas continuas mejor que las soldaduras
individuales a los puntos específicos de contacto como en la mancha
soldando. La articulación resultante en la soldadura continua
de arco es considerablemente más fuerte que en la soldadura de mancha.
Como la soldadura es continua, esta puede usarse para hacer embarcaciones
herméticas de presión y en otras aplicaciones de fabricación
donde la fortaleza y la continuidad se requieren. Hay diversas formas
de soldadura continua de arco, pero todos ellos siguen la descripción
general dada aquí. Las condiciones de trabajo no son buenas para
los seres humanos quienes trabajan con el proceso de soldadura continua
de arco. Los soldadores deben vestir un casquete nominal para proteger
sus ojos contra la radiación ultravioleta que es emitida por el
arco que solda el proceso. La ventana de casquete es suficientemente
oscura para escudar el ultravioleta, pero hay tanta oscuridad que
el trabajador no puede ver mediante la ventana a menos que el arco
esté sobre él. La corriente eléctrica alta se
usa en el proceso de soldadura, y esto crea un peligro para el soldador.
Finalmente, hay el peligro obvio por las altas temperaturas en el proceso,
demasiado alto para derretir el acero, aluminio, u otro metal que está
siendo soldado. Una cantidad importante de coordinación de
mano - ojo es requerido por el soldador para asegure que el arco
sigue la trayectoria deseada y con la exactitud suficiente haga una buena
soldadura. Esto, junto con las condiciones descritas arriba, resulta
en un alto nivel de agotamiento. Consiguientemente, el soldador es
el único en conclusión que solda durante el proceso el 20
a 30% del tiempo. Este porcentaje es llamado el "el arco -
sobre" tiempo, el tiempo durante el cambio cuando el soldador está
sobre y desempeñando el proceso, un segundo trabajador es comúnmente
presentado al sitio de trabajo para establecer las partes para ser
soldar y desarrollar otras tareas similares en el apoyo del soldador.
Este segundo trabajador es llamado el más apto. Por ello condiciones
en el arco manual soldando, la automatización que se usa es
técnicamente y económicamente factibles. Para soldar
trabajos que involucran largos y continuos las articulaciones y son
ensamblados repetidamente, se han diseñado maquinas soldadoras mecanizadas
para desempeñar el proceso.
Estas máquinas se usan
para las secciones largas y derechas así como en las partes redondas
regulares. Los ejemplos de estos trabajos soldados incluyen: de válvulas
de presión, los tanques, y pipas.
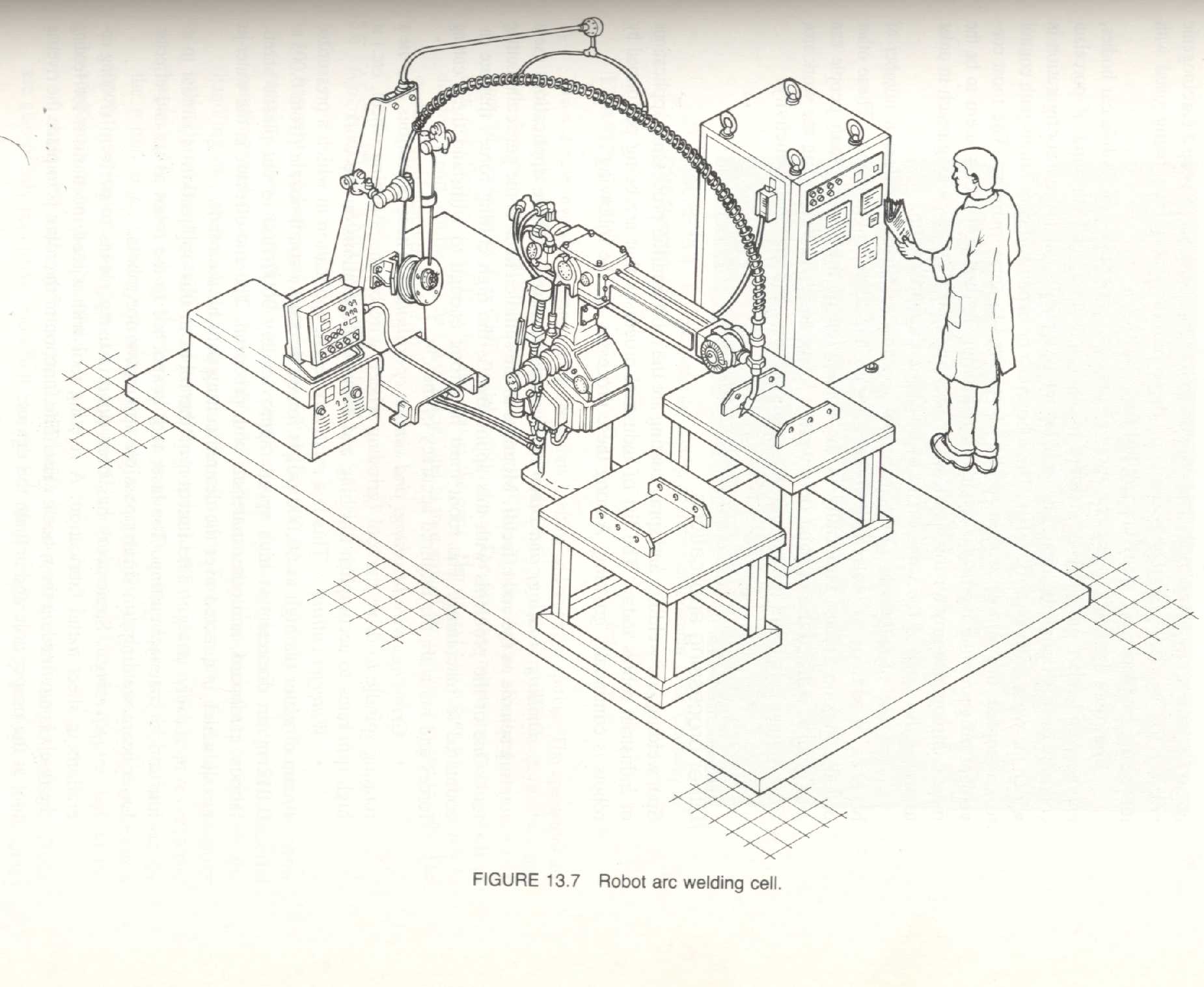
Los robots industriales se usan también para automatizar la soldadura continua por arco. Es más económico la soldadura continua del arco por medio des robot que solda. El estado actual de tecnología indica que la aplicación debería involucrar una relativamente alta corrida de producción. Un arreglo posible de lugar de trabajo para estas aplicaciones se ilustra en la Figura 13.7. La célula consiste del, del robot, los aparatos para soldador (unidad de poder, el controlador, herramienta de soldadura, y mecanismo de alimentación de telegrafía), y una fijación que ubica los componentes para el robot. La fijación podría ser mecanizada con varios grados de libertad para que este poder porciones diferentes actuales del trabajo al robot para soldar. Para mayor productividad, una fijación doble se usa frecuentemente para que un operador pueda desembarcar el trabajo completo y cargar los componentes para el próximo trabajo, ciclar mientras el robot esta simultáneamente soldando el trabajo actual. El robot usado en soldadura de trabajos debe ser capaz del control continuo de trayectoria. La programación es hecha típicamente por uno de los leadthrough métodos. Uniones de brazo y Cartesiano son coordinadas. los robots se usan frecuentemente en el soldado continuo de arco. El robot debería tener cinco o seis de ejes. Si no es así, la fijación que se usó para retener las partes durante la soldadura debería poseer varios grados de libertad para establecer la relación requerida geométrica entre el robot y el trabajo. La fijación debe diseñarse específicamente para el trabajo. De programación para la soldadura de arco es también costosa. Por lo tanto, la mayoría de las aplicaciones requieren que un lote grande clasifique para justificar la célula de robot. En el futuro, tan rápido - cambiar de fijaciones se desarrollan y el esfuerzo programador se reduce, las corridas más cortas de producción serán posibles en el arco de que robot que soldé aplicaciones.
Pintura de spray.
Pintura de spray es el ejemplo más común de una clase general de las aplicaciones de robot llamado rocío cubriendo. El término posterior sugiere la gama más ancha de aplicaciones posibles, que incluye el pintando. El rocío que cubre el proceso hace uso de una pistola de spray dirigido al objeto para ser revestido. El fluido (por ejemplo pintura) fluye mediante la boquilla de la pistola de rocío para ser dispersada y aplicarla sobre la superficie del objeto. El ambiente de trabajo para seres humanos quienes desarrollan este proceso están expuestos a los peligros de salud. Estos peligros incluyen vapores nocivos en el aire, riesgo de que caigan residuos en el ojo, y ruido desde la boquilla de la pistola de rocío. En el ambiente se crea también para adquirir el riesgo de contraer cáncer en los trabajadores. En su mayor parte el operador se arriesga, los robots están siendo usados con frecuencia creciente para cubrir las tareas de los operadores.
Las aplicaciones des robot incluyen rocío que cubre los aparatos, cuerpos de automóvil, motores, y otras partes, el rocío que mancha de productos de madera, y rociando de revestimientos de porcelana sobre fijaciones de sala de baño. El esquema de la célula es típicamente una línea de configuración en que el trabajo fluye pasando por el robot. El robot debe ser capaz de tener una trayectoria continua controlado para realizar las sucesiones lisas de movimiento requeridas en el que rocío pinte. El método programador más conveniente es manual leadthrough. Los robots unidos de brazo parecen ser la anatomía más común para esta aplicación. El robot debe poseer un alcance largo a fin del acceso las áreas de las partes de trabajo para ser revestidas en la aplicación. El uso de robots industriales para el rocío que cubre aplicaciones ofrece un número de beneficios, además de proteger trabajadores desde un ambiente peligroso. Estos otros beneficios incluyen la uniformidad mayor en la aplicación del revestimiento que la gente puede realizar, reducir el uso de pintura (menos derroche), rebajar necesidades que ventile el área de trabajo desde los seres humanos no es presentado durante el proceso, y mayor productividad.
Otros procesos de aplicaciones.
La soldadura de mancha, soldadura continua de arco, y el revestimiento de rocío son las aplicaciones de procesadores más familiares de robots industriales actualmente. La lista de procesos industriales que están siendo desempeñados por robots continuamente crecen. Entre estos procesos son los siguientes:
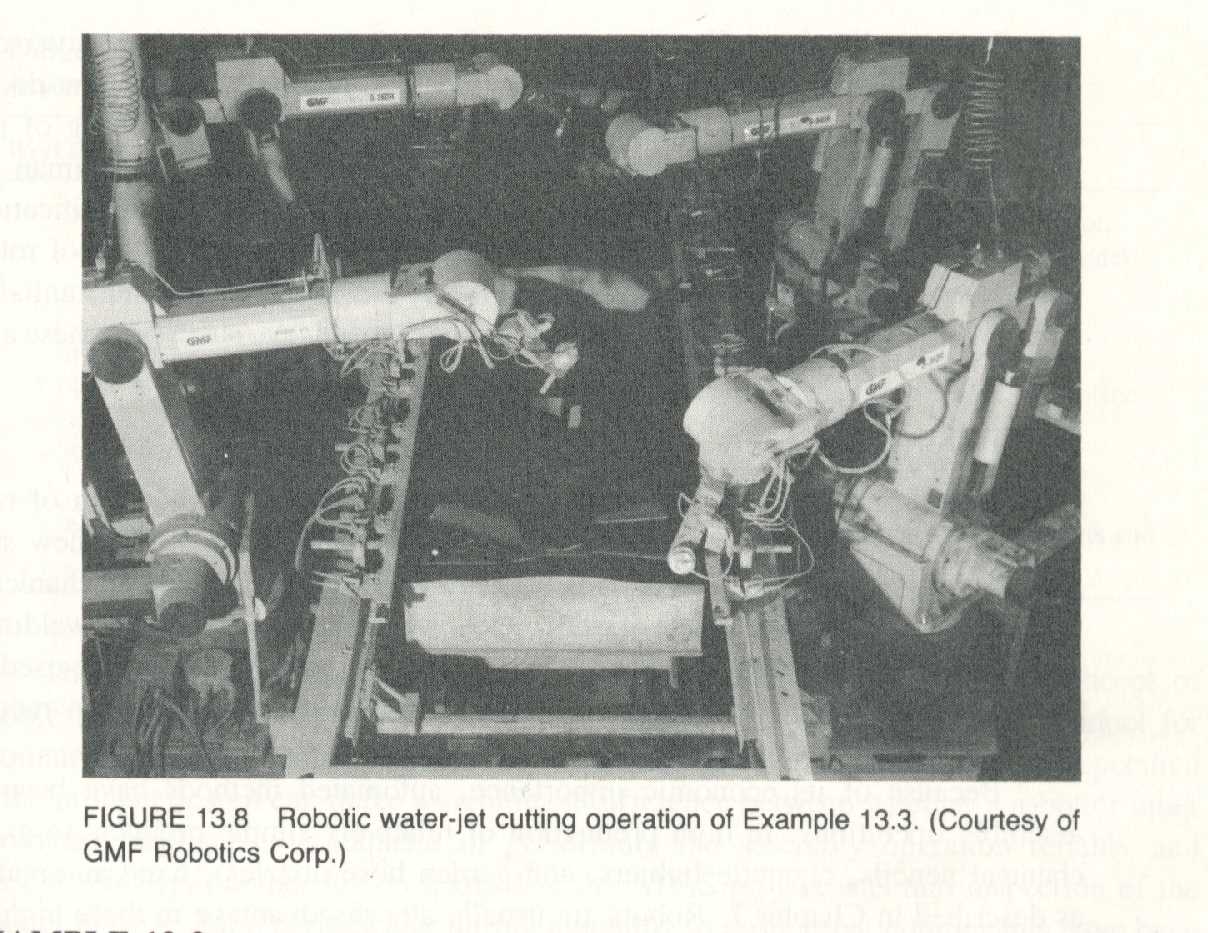
EL EJEMPLO 13.3
Este ejemplo involucra dos operaciones de procesadores, encaminamiento y agua jet cortando. Las operaciones se ubican al Adrián (Michigan) planta de Chevrolet de División de Cuerpo General de Motores. Dos tanques de combustible termalmente formados fuera de un diámetro de 0. 195-in. hojas de polietileno presentes en la célula de trabajo consistiendo de cuatro GMF de modelo S-360 de robots. El primero de dos robots usan encaminamiento de herramientas como su efector para cortar 12 hoyos y ranuras en las partes. El segundo de dos robots usan agua-jet para dividir la parte en dos de los tanques de combustible blindados y para recortar alrededor la periferia de los escudos. La célula de trabajo se ilustrar en la Figura 13.8.