|
|
|
|
El manipulador de un robot industrial se construye de una serie de articulaciones
y uniones. La anatomía de un robot tiene que ver con los tipos
y tamaños de estas articulaciones y uniones y otros aspectos de
la construcción física de manipulador.
ARTICULACIONES Y UNIONES
Una articulación de un robot industrial es similar a una articulación
en el cuerpo humano; provee movimiento relativo entre dos de partes del
cuerpo. Cada articulación provee al robot con un determinado
grado de libertad de movimiento. En casi todos los casos, solamente
un grado de libertad se asocia con una articulación. Los futuros
robots pueden diseñarse con articulaciones que tengan más
de un grado de libertad cada una. Los robots se clasifican frecuentemente
según el número total de grados de libertad que poseen.
Conectado a cada articulación son dos uniones, uno que nosotros
llamamos el nexo de entrada, el otro llamado el nexo de salida. Los
nexos se consideran como los componentes rígidos del robot.
El propósito de la articulación es proveer un movimiento
relativo controlado entre el nexo de entrada y el nexo de salida.
Casi todos los robots industriales tienen articulaciones mecánicas
que pueden clasificarse dentro de uno de cinco tipos. Ellos incluyen
dos de tipos que proveen movimiento lineal y tres de tipos que proveen
movimiento rotativo. Estos tipos de articulaciones se ilustran en
la Figura 11. 1.
Los cinco tipos de articulaciones son:
1 . Articulación Lineal. El movimiento relativo entre el nexo de entrada y el nexo de salida es un movimiento deslizable lineal, con los ejes de los dos nexos siendo paralelos. Nosotros nos referimos a este como un tipo de articulación L.
2. Articulación Ortogonal. Este es también un movimiento deslizable lineal, pero los nexos de entrada y salida son perpendiculares el uno del otro durante el movimiento. Este es un tipo de articulación 0.
3.
Articulación Rotacional.
Este tipo provee un movimiento relativo giratorio de las articulaciones,
con
el eje de rotación perpendicular a los ejes de los nexos de entrada
y salida. Este es un tipo de articulación R.
4. Articulación Torcional. Esta articulación también involucra un movimiento rotativo, pero el eje de rotación es paralelo a los ejes de los dos de nexos. Nosotros llamamos a este un tipo de articulación T.
5.
Articulación Giratoria.
En este tipo de articulación, el eje del nexo de entrada es paralelo
al
el
eje de rotación de la articulación, y el eje del nexo de
salida es perpendicular al eje
de
rotación. Nosotros nos referimos a este como un tipo de articulación
V.

Cada uno de estos tipos de articulación tiene un rango en el que
puede moverse. Un rango típico para una articulación
lineal puede ser desde varias pulgadas a varios pies. Los tres tipos
de articulaciones que involucran el movimiento rotativo puede tener un
rango tan pequeño como unos cuantos grados o tan grandes como varias
vueltas completas.
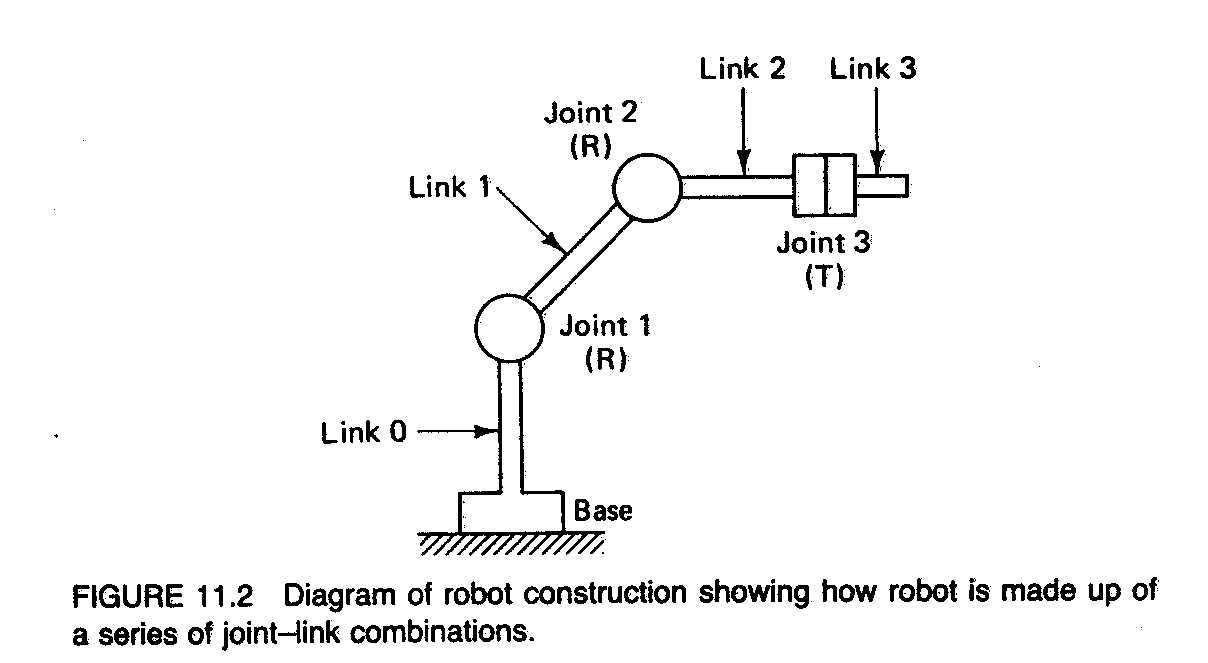
La mayoría de los robots se montan sobre una base estacionaria en
el piso. Debemos referirnos a esa base y su conexión a la
primer articulación como nexo 0, este es el nexo de entrada a la
articulación 1 , el primero en la serie de articulaciones usadas
en la construcción del robot. El nexo de salida de la articulación
1 es el nexo 1. El nexo 1 es el nexo de entrada a la articulación
2, cuyo nexo de salida es el nexo 2, y así sucesivamente.
Este esquema articulación-nexo se ilustra en la Figura 11.2.
Un manipulador típico de robot puede dividirse en dos secciones:
un ensamble cuerpo-brazo y un ensamble de muñeca. Hay comúnmente
3 grados de libertad asociado con el cuerpo-y-brazo, y también 2
o 3 grados de libertad comúnmente asociados con la muñeca.
El extremo de la muñeca del manipulador es un objeto que es relativo
a la tarea que debe ser realizada por el robot. Por ejemplo, el objeto
debe ser una parte de trabajo que será cargado en una máquina,
o una herramienta que se manipula para desempeñar algunos procesos.
El cuerpo-y-brazo del robot se usa para ubicar el objeto y la muñeca
del robot se usa para orientar el objeto.
Para establecer la posición del objeto, el cuerpo-y-brazo debe ser
capaz de mover el objeto en cualquier de las siguientes tres de direcciones:
1.
Movimiento vertical (movimiento del eje z)
2.
Movimiento radial (movimiento dentro-fuera o del eje y)
3.
Movimiento derecha-a-izquierda (movimiento del eje x o giro sobre un eje
vertical sobre la base)
Dependiendo de los tipos de articulaciones usados para construir el cuerpo-y-brazo, hay una variedad de maneras diferentes para realizar estos movimientos. Nosotros examinamos las diversas combinaciones de articulaciones en la subsección siguiente.
Para establecer la orientación del objeto, nosotros podemos definir
3 grados de libertad para
la
muñeca del robot. La siguiente es una configuración
posible para 3 grados de libertad en el ensamble de muñeca:
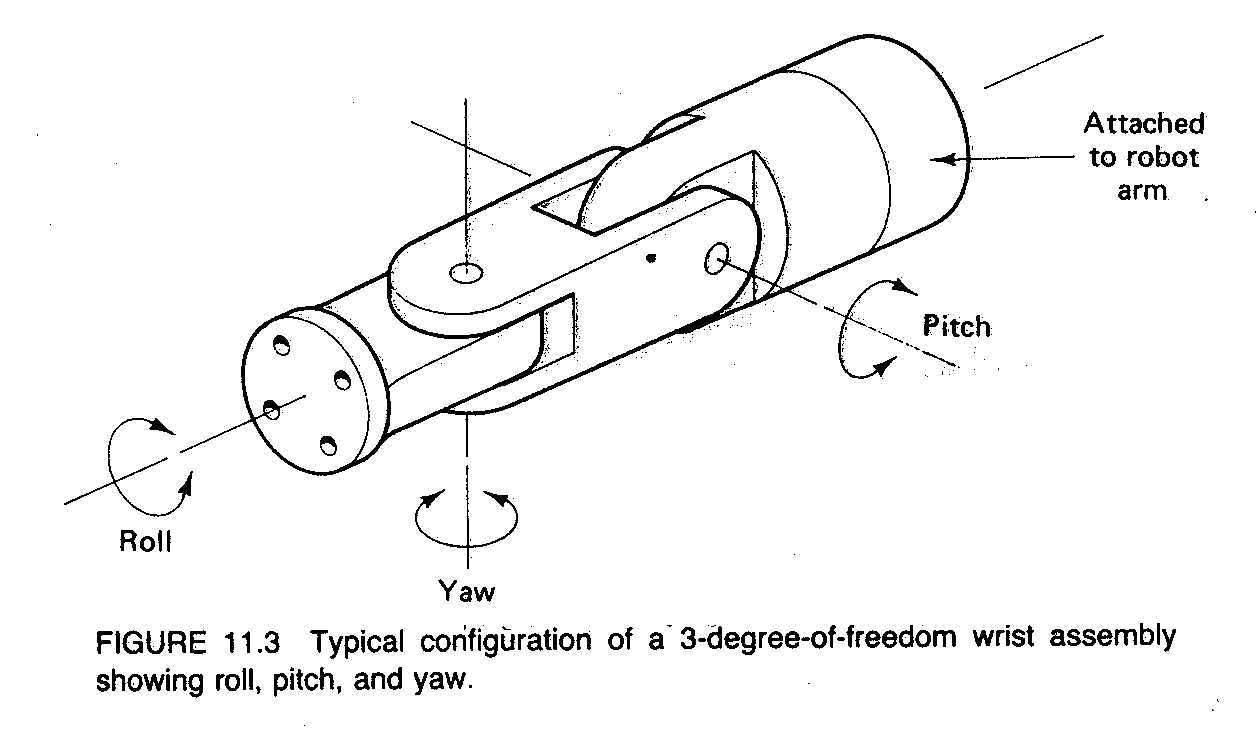
1. Rotar. Este grado de libertad puede ser realizado por una articulación tipo T para rotar el objeto sobre el eje de brazo.
2. Inclinar. Esto involucra la rotación arriba-y-abajo del objeto, típicamente este se realiza por medio de una articulación tipo R.
3. Desviar. Esto involucra una rotación derecha-a-izquierda del objeto, típicamente se realiza usando una articulación tipo R.
Estas definiciones se ilustran en la figura 11.3. Para evitar complicaciones en las definiciones de lanzamiento y guiñado, el rollo de muñeca debería asumirse en su posición central. Para ilustrar la posible confusión, una articulación tipo la cual provee una rotación arriba-y-abajo si el rollo de muñeca está en su posición central proveería una rotación derecha-a-izquierda si la posición del rollo fuera 90 grados desde el centro.
Podemos usar la carta de símbolos para los cinco tipos de articulaciones (es decir, L, 0, R, T, y V) para definir un sistema de notación de articulaciones para el manipulador de robot. En este sistema de notación, el manipulador es descrito por los tipos de articulaciones que constituyen el ensamble cuerpo-y-brazo, seguido por los símbolos de articulaciones que constituyen la muñeca. Por ejemplo, la notación TLR:TR representa un manipulador de 5 grados de libertad cuyo cuerpo-y-brazo se constituye de una articulación Torcional (articulación l), una articulación lineal (articulación 2), y una articulación giratoria (articulación 3). La muñeca consiste de dos articulaciones, una articulación Torcional (articulación 4) y una articulación Rotacional (articulación 5). Un colon separa la notación cuerpo-y-brazo de la notación de muñeca.
CONFIGURACIONES COMUNES DE ROBOTS
Dados los cinco tipos de articulaciones definidas arriba, hay 5 x 5 x 5 = 125 diferentes combinaciones de articulaciones que pueden usarse para diseñar el ensamble cuerpo-y-brazo para un manipulador de robot con 3 grados de libertad. Esto ni siquiera considera variaciones en el diseño dentro de los tipos de articulaciones individuales (por ejemplo: medidas, rangos de movimiento, orientación, etc.), o que el cuerpo-y-brazo pueda tener más de o menos de tres articulaciones. Esto es algo notable, por lo tanto, que hay solo cinco configuraciones básicas usualmente disponibles en robots industriales comerciales. Estas cinco configuraciones son:
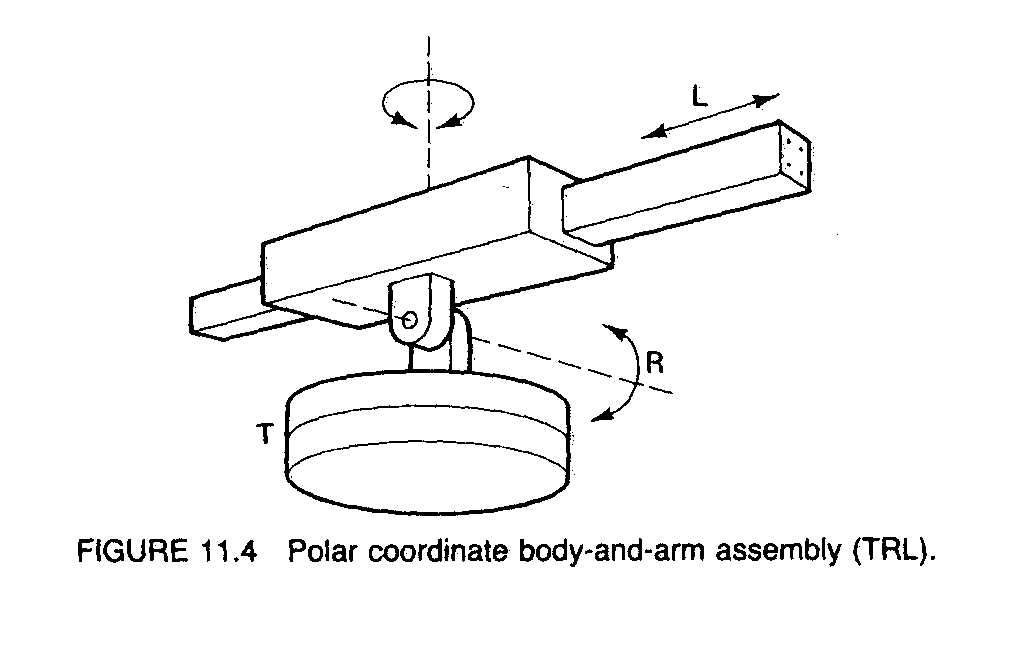
1. Configuración polar. Esta configuración tiene una anotación TRL. Un brazo deslizable (articulación tipo L) que actúa relativo al cuerpo, el cual puede rotar sobre ambos ejes: un eje vertical (articulación tipo T) y un eje horizontal (articulación tipo R). Esta configuración se ilustra en la figura 11.4.
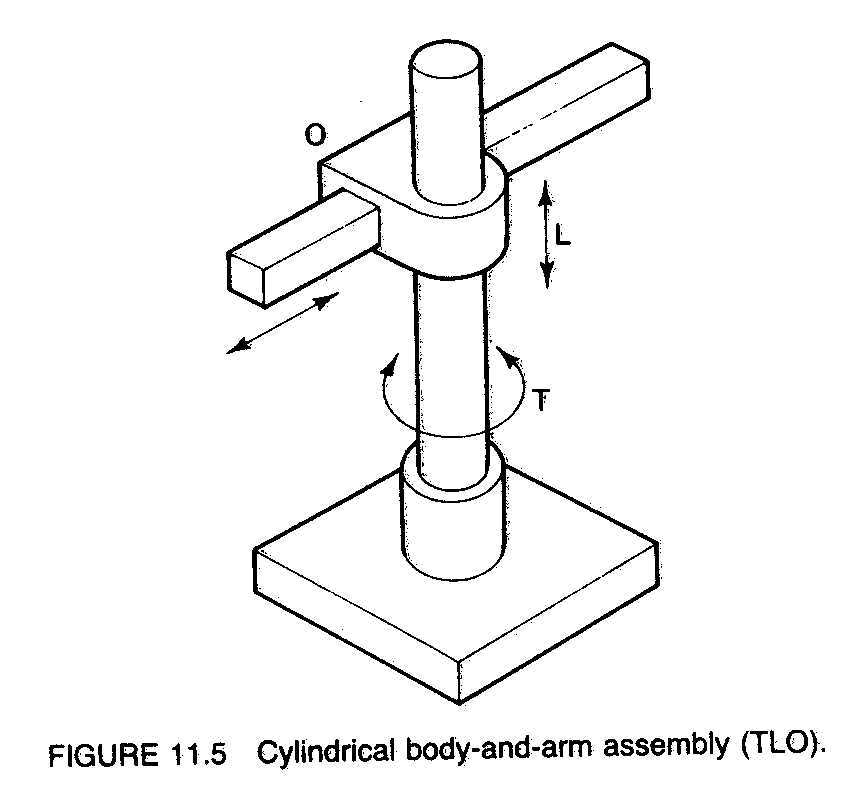
2. Configuración cilíndrica. Esta configuración de robot consiste de una columna vertical, relativa a que un ensamble de brazo pueda moverse arriba y abajo. El extremo del brazo puede moverse dentro y fuera en relación al eje de la columna. Esta configuración puede ser realizada estructuralmente de varias maneras. Las posibilidades incluyen TLO y LVL. La primera de estas construcciones se ilustra en la figura 11.5.
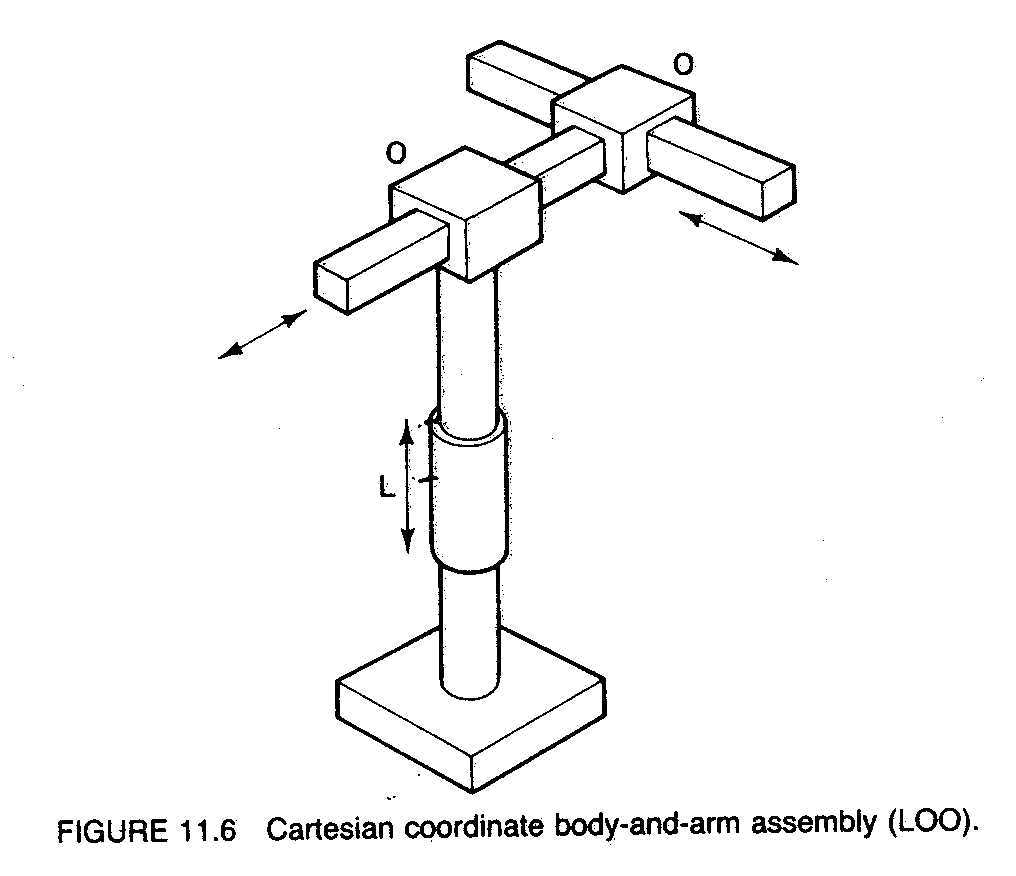
3. Robots de coordenadas cartesianas. Los otros nombres para esta configuración incluyen robot rectilíneo y robot x-y-z. Como se muestra en la figura 11.6, esto se compone de tres articulaciones deslizables, dos de las cuales son ortogonales. El esquema en la figura muestra una notación LOO. Otra notación posible es OLO.
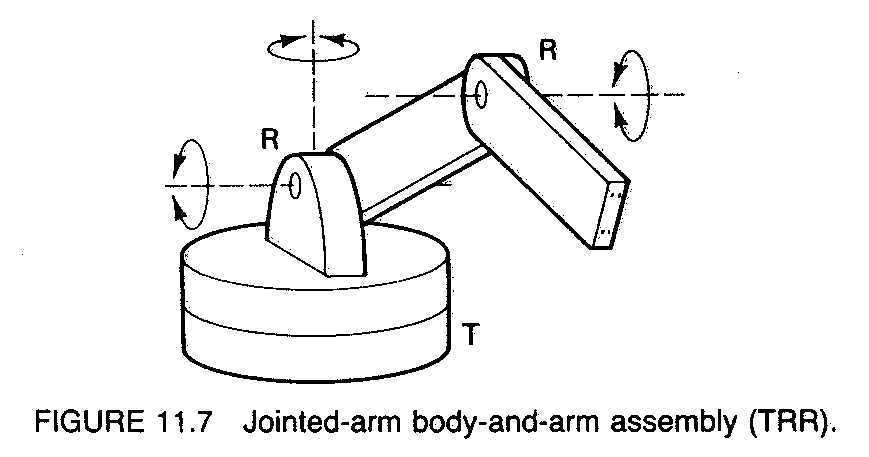
4. Robot de brazo articulado. Este robot tiene la configuración general de un brazo humano. Su brazo tiene una articulación de hombro y una articulación de codo, y el brazo puede ser girado sobre su base. Las configuraciones posibles para este tipo incluyen TRR y VVR. El tipo TRR se ilustra en la figura 11.7.
5. SCARA. SCARA es una sigla para Selective Compliance Assembly Robot Arm. Este es similar al robot de brazo articulado, excepto que los ejes rotacionales del hombro y codo son verticales. Esto significa que el brazo puede construirse para ser muy rígido en la dirección vertical, pero flexible en la dirección horizontal. Esto permite que el robot desempeñe tareas de inserción (para el ensamble) en una dirección vertical donde algún ajuste lado-a-lado puede necesitarse para unir las dos de partes adecuadamente. Una notación posible para un SCARA sería VRO, como se indica en la figura 11.8.

El robot SCARA es el único en el que típicamente no se tiene
un ensamble separado de muñeca. Como se indica en la descripción,
este se usa para operaciones de ensamble de tipo inserción en el
que la inserción se hace desde arriba. Consiguientemente, los requerimientos
de orientación son mínimos y la muñeca es por lo tanto
no necesaria. La orientación Rotacional del objeto a ser insertado
sobre un eje vertical es requerido algunas veces, y que una articulación
de rotación adicional se provea para este fin. Esto puede
ser indicado por la notación VROT.
Las
otras cuatro configuraciones cuerpo-y-brazo poseen ensambles de muñeca
que casi siempre consisten de combinaciones de articulaciones giratorias
de tipos R y T. Las configuraciones típicas de muñeca incluye
TR y TRR. La configuración TRR se ilustra en la figura 11.
3.
VOLUMEN DE TRABAJO
El volumen de trabajo del manipulador se define como el espacio dentro del cual el robot puede manipula el extremo de su muñeca. El volumen de trabajo es determinado por el número y los tipos de articulaciones en el manipulador (cuerpo-y-brazo y muñeca), el tamaño físico de las articulaciones y nexos, y los rangos de las diversas articulaciones.
La forma del volumen de trabajo depende en su mayor parte del tipo de configuración
de robot. Una configuración polar tiende a tener una esfera
parcial como su volumen de trabajo; un robot cilíndrico tiene un
espacio cilíndrico de trabajo; y un robot de coordenadas cartesianas
tiene un espacio rectangular de trabajo.
|
|