|
|
Las herramientas y sujetadores mencionadas en la sección anterior se llaman efectores finales. Un efector final se define como el dispositivo especial que adjunto a la muñeca del manipulador permite al robot realizar una tarea específica. A causa de las amplias variaciones en tareas que son desempeñadas por robots industriales, el efector final debe ser comúnmente diseñado y fabricado para un trabajo especifico. En el caso de un sujetador, la forma y el tamaño de la pieza variará para aplicaciones diferentes; esto influirá el diseño delsujetador.
Las herramientas y sujetadores son las dos categorías generales de efectores finales usados en robótica. Las herramientas se usan en aplicaciones donde el robot debe desempeñar alguna operación de proceso sobre la pieza de trabajo. Por lo tanto, el robot manipula la herramienta relativa al objeto en movimiento lento o estacionario. Los ejemplos de las herramientas usados como efectores finales por robots para desempeñar aplicaciones de proceso incluyen:
*
La soldadora de puntos
*
La soldadora de arco
*
La pistola para pintar
*
Taladro
*
Herramientas de ensamble (p. ej., destornillador automático)
*
Soplete
*
Cortadora de agua a presión
En cada caso el robot debe controlar no solamente la posición relativa de la herramienta con respecto al trabajo como una función de tiempo, debe controlar también la operación de la herramienta. Para este fin, el robot debe ser capaz de transmitir las señales de control a la herramienta para comenzar, parar, y de otra manera regular sus acciones.
Los sujetadores son los efectores finales usados para asir y manipular objetos durante el ciclo de trabajo. Los objetos son comúnmente piezas de trabajo que se mueven desde una ubicación a otra en la célula. Las aplicaciones de carga y de desembarque de la máquina caen en esta categoría. Otros objetos que pueden ser manejados por sujetadores incluyen herramientas. Cuando las herramientas son sostenidas por los sujetadores en lugar de ser unidas directamente al extremo de la muñeca, es porque más de una de herramienta va a ser manipulada durante el ciclo de trabajo. El sujetador toma la forma de sostenedor de herramienta de cambio rápido para un ajuste o desajuste rápido de las diversas herramientas usadas durante el ciclo.
Los ejemplos de pinzas usadas como efectores finales en las aplicaciones industriales del robot incluyen las siguientes:
*
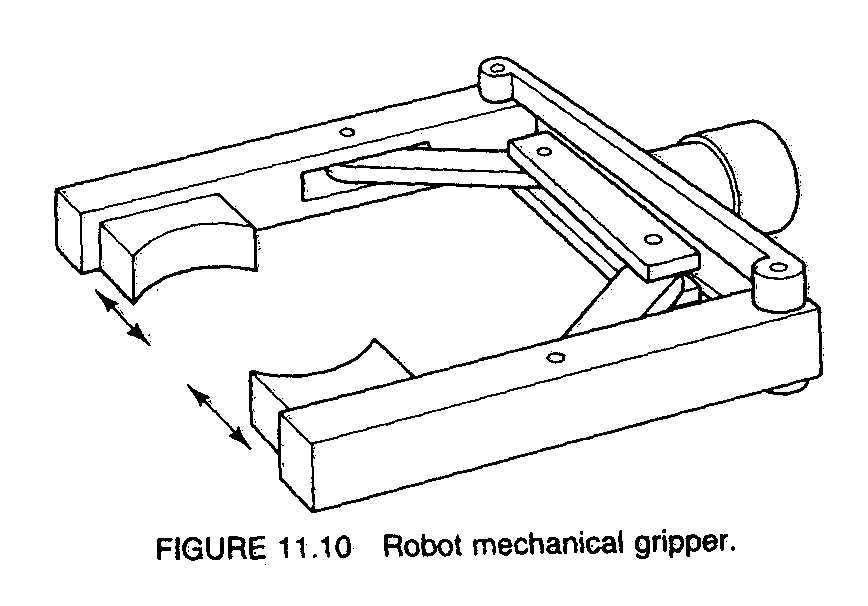
Sujetadores Mecánicos, en las cuales
la parte es sujetada entre dedos mecánicos y los dedos se activan
mecánicamente.
*
Sujetadoress de vacío, en las cuales
las tazas de succión se usan para retener objetos planos.
*
Dispositivos magnetizados, para sostener
piezas ferrosas.
*
Dispositivos adhesivos, donde una sustancia
adhesiva se usa para retener un material flexible, como
telas.
El diseño de un sujetador mecánico se ilustra en la Figura 11.10.
Algunas de las innovaciones y adelantos en la tecnología del efector final incluye sujetadores dobles (dos dispositivos de sujetadores para dos piezas de trabajo en un efector final), dedos intercambiables que pueden usarse sobre un mecanismo sujetador, sujetadores de cambio rápido (y herramientas, como las mencionadas anteriormente), capacidad sensitiva de retroalimentación en los dedos, y configuraciones de dedos múltiples.
Los efectores finales estándar han comenzado a ser comercialmente
disponibles, así se reduce la necesidad de personalizar el diseño
de la pinza para cada aplicación separada de robot.
|
|