| INTRODUCTION | |||||||||||||||||||||||||||||||
| Report Introduction | |||||||||||||||||||||||||||||||
In this report, I will list down some information on the issues surrounding autonomous agents. As we all know, there are a lot of different kinds of autonomous agents out there in the technological world. Right now, I am going to specifically concentrate on the issues on autonomous agents affecting autonomous text-mining systems; which reflects the project theme that I am doing in Kent Ridge Digital Labs entitled, Towards an Autonomous Bibliography Building Agent (ABBA). I am also going to
elaborate on some autonomous agents affecting robotics. As part of this attachment
assignment deals with RoboCup (the autonomous soccer playing robots), I will therefore
touch on some of the general explanations to some robotics autonomous agents. I will take
the robotic agents in the robot developed by the car producing company known as HONDA, a
prototype human agent known as P-2 for the example to accompany the explanations to
autonomous agents in robotics. |
|||||||||||||||||||||||||||||||
| Project Introduction | |||||||||||||||||||||||||||||||
The title of this project is 'Towards An Autonomous Bibliography Building Agent also easily known as ABBA. ABBA is a program that will automatically organise bibliographic information of a particular document into a standardised bibliographic format, upon entering some parameters and commands to the program. Take for example that this project is focusing on documents on the Internet, specifically documents on RoboCup papers. Basically the project will create a program that will go to the Internet, (or the local drives, area of search will be specified by the user of the program) and search for new RoboCup papers, an example would be on-line conference proceedings, magazines, minutes of meetings, books, HTML documents, word documents, journals and magazines and many more. Upon identifying the new information on the Internet, the program will fetch the documents onto the local drive using the HTTP function. Once the information is in the local drive, the program will begin to parse the documents to identify and select the necessary information needed by the user. As for this case, the user needs all the bibliographies of the new RoboCup papers. The program will then select those relevant information and organised them for presentation to the user. The program will also stores the processed information neatly as to aid retrieval. For this example, ABBA is a program that will automatically reconises the bibliographic entries of a particular document like the Title, Statement of responsibility, Date of publication, Publication origin of a document and etc. Basically my task
is to do a research and acquire information on the issues affecting Project ABBA
(e.g. neural network application, text mining tools, etc.), which specifically targeted at
text and data mining. On the next page, I have included some graphical explanation to the
functions of Project ABBA. |
|||||||||||||||||||||||||||||||
| Graphical Explanation
To Project ABBA Autonomous Bibliography Building Agent |
|||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||
Explanations to the graphs above |
|||||||||||||||||||||||||||||||
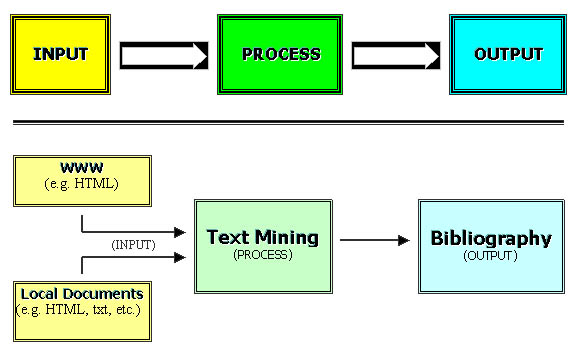
Input basically is the process of gathering source materials to be used as input for the text mining process. Materials can be of any form of text document. It can be strictly a normal text document like the ever popular Microsoft Word document or just a Notepad documents; or it can also be a compound document like the hypertext documents on the Internet, which include images and sound.For example ‘RoboCup Bibliography’ is chosen as the subject. The user will enter the subject and the area of search (lets take the Internet for example) for the program to process. Process is the process of analysing, identifying and acquiring of information from the documents that is being inputted and processed. What the program does is that it will search for the necessary information prompted by the user (just like the search function in most web search engines) and locates them in the specified area (can be the Internet or local drives).For example the program will go to the Internet and retrieved webpages that have RoboCup bibliographies in them and will then bring it to the local drive for processing. It will filter out irrelevant information and select the required information from the webpage, like the title, statement of responsibility, etc. Output is basically the processed product of the autonomous text mining process. The information outputted contains the crux of the information from the processed documents, the information is also organised into a neat bibliographical format. For example the program will produce a standardised bibliographical
format of the processed information from the fetched RoboCup webpage and stores them
neatly in the local drive, or presents them to the user. |
|||||||||||||||||||||||||||||||
| Introduction on Autonomous Agents | |||||||||||||||||||||||||||||||
Over the past decade new approaches have emerged that have revolutionized the design of intelligent autonomous systems. Even more recently, research on autonomous agents has undergone a renaissance as it has progressed from its roots in distributed AI. In this project assignment, I will list some issues surrounding autonomous agents affecting text-mining systems. Research on autonomous agents has often concentrated on higher cognitive and organizational activity such as:
User interface
design is crucial in furthering the goal of freeing autonomous agents from laboratory
settings and moving them out into the real world. Most results from this community have
software embodiments as opposed to their robotic counterparts. Examples include softbots
and other agents that reside within the worldwide web, heterogeneous databases, and other
large-scale software systems. |
|||||||||||||||||||||||||||||||
| What are Autonomous Agents? | |||||||||||||||||||||||||||||||
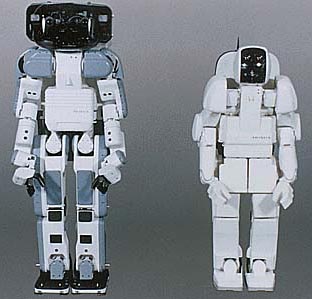
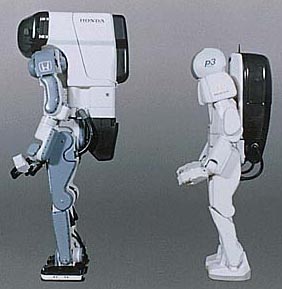
| Autonomous agents are computer systems or software entities that are capable of independent action in dynamic, unpredictable environments. In other words they are known as AI or Artificial Intelligence, which somehow or another have a mind of their own and they can perform predictions and certain tasks aiming at aiding humans in their work (e.g. the autonomous human-like robot from HONDA, known as P-2 (prototype 2), refer to image 1 and 2). The ultimate goal of artificial intelligence is to construct a fully autonomous agent that operates in the physical world, much as humans do.
An agent is anything which can be considered that perceives its environment through sensors and responds or behaves in such environment by means of effectors (Rusell & Norvig 1995). An autonomous agent is one whose behavior is based mainly on its own existence, although being able to use certain built-in knowledge. Similar to the way evolution has given animals a number of built-in reflexes so that they can survive until being capable of learning by themselves, it is reasonable to give an intelligent agent with certain initial knowledge and ability to learn. As much as an agent’s acts is based on integrated suppositions, its behavior would be satisfactory only as much as those suppositions are current, lacking any flexibility. A real autonomous agent will be capable of successfully functioning under a broad environment spectrum, given enough time to adapt. There is little or no dependency on abstract world representations, and behaviors instead of plans are the agents� interaction with the world. There are different types of autonomous agents. Basically they are categorised in this manner:
Software agents vary and can be classified as:
|
|||||||||||||||||||||||||||||||
| Agent Classification | |||||||||||||||||||||||||||||||
| Below is a table of
information on the different classification of autonomous agents. Different agents have
different functions; thus all the different agents below aid the world’s development
according to their purpose of existance. |
|||||||||||||||||||||||||||||||
There are, of course, other
possible classifying schemes. For example, they might be classify as software agents
according to the tasks they perform, for example, information gathering agents or email
filtering agents. Or, they might be classify as according to their control architecture.
Agents may also be classified by the range and sensitivity of their senses, or by the
range and effectiveness of their actions, or by how much internal state they possess. |
|||||||||||||||||||||||||||||||
| Origins of Agents | |||||||||||||||||||||||||||||||
| Agents have their
origin in psychology, artificial intelligence, and distributed artificial intelligence,
integrating learning, planning, reasoning, knowledge representation aspects, and have as
goal to execute complex tasks benefiting users, that otherwise would be hard to
accomplish. Users have the possibility of assigning goals to be achieved by the agents, in
contrast to conventional software systems limiting the users to previously specified
goals, which cannot be modified. |
|||||||||||||||||||||||||||||||
Full Documentation in MS Word Format |
|||||||||||||||||||||||||||||||
|
Full documentation on the issues affecting autonomus agents: Text mining, in MS Word
format. This documentation is the final documentation that is handed in to my supervisor,
for grading for the attachment project.
|
|||||||||||||||||||||||||||||||