
Por ser urn sistema complexo e destacado, os discos rígidos merecem muita atenção. Como é o tipo de mídia mais utilizado atualmente, os discos rígidos possuem importância vital para os microcomputadores e principalmente para o usuário, que neles guardará todos os programas e dados gerados. Pelos discos rígidos passam as mais fantásticas idéias dos melhores autores. Até mesmo o conteúdo deste livro está armazenado em um disco rígido.
Entender o funcionamento de um disco rígido é de vital importância, tanto do ponto de vista da montagem e da manutenção de microcomputadores, mas principalmente, da recuperação de dados. Se possui tanta importância, esse sistema tem de ser o mais seguro possível. Mas nem sempre é assim que ocorre... (Lei de Murphy: Por que o microcomputador resolve não funcionar justamente no último dia do prazo de entrega de um importante trabalho?)
O disco rígido, também
conhecido como disco fixo ou pelo seu apelido Winchester, é
uma das melhores formas de gravarmos uma grande quantidade de informações
para uso posterior (memória de massa). A idéia de um disco
rígido é simples: imagine um disquete que, ao invés
de ser flexível e removível, seja rígido e fixo
a um sistema de controle. A caixa preta em que isso é abrigado é
o disco rígido.
Por ser lacrado, o disco rígido pode ter uma precisão muito maior: em disquetes há uma tolerância em relação às trilhas do mesmo, pois um disquete pode se acomodar com uma certa folga dentro de uma unidade de disquete. Por ser fixo, o tamanho da cabeça de leitura/gravação pôde ser reduzido sensivelmente. Como conseqüência imediata temos um menor tamanho do campo magnético, possibilitando a gravação de dados mais próximos uns dos outros. Com isso temos uma alta quantidade de trilhas e setores em um só disco.
Na verdade, não é
utilizado um só disco, mas sim um conjunto deles, dois, trës
ou quatro, por exemplo, mas isso é transparente ao usuário,
uma vez que o sistema operacional trabalha com clusters com numeração
seqüencial. Para cada disco desses, existe uma cabeça de leitura
e gravação específica fazendo com que, ao contrário
das unidades de disquete que normalmente possuem duas cabeças, eles
possuam várias cabeças, quatro, seis ou oito, para os exemplos
dados.
O motor do disco rígido faz com que o conjunto dos discos gire a uma velocidade elevadíssima: pelo menos 3.600 rpm. Discos rígidos modernos giram a 4800 rpm, 7200 rpm ou mais. Com uma velocidade tão alta, uma simples partícula de poeira equivaleria a uma grande explosão se em contato com a superfície magnética. Por esse motivo o disco rígido é um sistema lacrado e sem contato direto com o meio externo. Desse modo, não podemos abrir o disco rígido.
Por estar girando tão rápido, cria-se um colchão de ar entre a superfície magnética dos discos e as cabeças de leitura/gravação. Portanto, quando em funcionamento, não há contato entre as cabeças de leitura/gravação e a superfície magnética. Caso existisse esse contato, as cabeças marcariam inevitavelmente a superfície magnética, acarretando a perda de dados escritos e, principalmente, a destruição imediata da mesma.
Quando há alimentação, o disco rígido entra em funcionamento irnediato, girando constantemente. Caso o motor do conjunto de pratos fosse acionado somente quando acessado 0 disco rígido (como ocorre com os disquetes dentro das unidades de disquete), a inércia faria com que dados demorassem muito para ser acessados. Portanto, para atingir uma velocidade de acesso rápida, os discos giram constantemente. O gerenciamento de consumo elétrico existente em alguns microcomputadores pode determinar, porém, períodos de intervalo no giro do motor dos pratos, de modo a economiza energia.
Mas e quando desligamos o disco
rígido, o que acontece? Os primeiros discos rígidos simplesmente
deixavam o conjunto de cabeças encostado sobre a superfície
magnética, exatamente no ponto em que a alimentação
foi cortada. Não que isso significasse perda de dados ou danos à
superficie magnética, pois o conjunto dos discos não iria
ser movimentado. Ou seria? Esse era o grande problerna. Choques mecânicos
faziam com que os discos e/ou conjunto de cabeças se movimentassem,
acarretando a destruição imediata da superfície magnética
na área em que estavam apoiadas as cabeças.
A solução encontrada inicialmente para esse problema foi a utilização de um pequeno programa que colocasse o conjunto de cabeças sobre uma trilha que normalmente não fosse utilizada. Essa trilha era a última do disco rígido, utilizada como uma área de escape ou zona de estacionamento. Na verdade, esse procedimento, conhecido como recolhirnento das cabeças, era, um "esticamento" das cabeças até a última trilha. O primeiro cilindro possui informações vitais para o disco rígido: o MBR e o setor de boot, como vimos. Tal software era conhecido como PARK (estacionamento) e era fornecido pelo fabricante do disco rígido, para ser utilizado antes de se desligar o microcomputador, evitando danos à superfície magnética.
Porém, atualmente, não há muito
com que se preocupar. A utilização de uma rotina de estacionamento
do conjunto das cabeças é tão importante que todos
os fabricantes constroem discos rígidos que fazem o estacionamento
da cabeça automaticamente, toda vez que a alimentação
do disco rígido é cortada. Portanto, não há
a menor necessidade de utilização do programa PARK em discos
rígidos hoje em dia. Quando falamos "os primeiros discos rígidos",
nos referíamos a discos rígidos de incríveis 5, 10
e 20 MB de capacidade de armazenamento.
Quando nos referimos a disquetes, assumimos que trilha
e cilindro são sinônimos. Porém, no caso dos discos
rígidos, a nomenclatura é ligeiramente diferente. Quando
falamos em trilha, nos referimos a uma trilha de um determinado disco isoladamente,
já que, quando falamos em cilindro, queremos nos referir a um conjunto
de trilhas que ocupam a mesma posição espacial no total de
discos presentes no disco rígido. Por exemplo: quando dizemos Trilha
0, podemos estar nos referindo à trilha 0 de qualquer disco presente
no acionador de disco rígido. No entanto,
quando dizemos Cilindro 0, estamos nos referindo ao conjunto formado por
todas as trilhas 0 presentes, totalizahdo todos os discos existentes no
acionador de disco rigido.
Em um disco rígido, a numeração
dos setores não é feita seqüencialmente em uma mesma
face como nos disquetes, mas sim distribuídos pelas faces do disco.
Para melhor desempenho de busca em disco, os setores
que compõem um arquivo deverão estar seqüenciais. Se
estiverem distribuídos pelas faces de modo que o conjunto das cabeças
não precise nem se mover, melhor ainda. Um arquivo de quatro
setores, por exemplo, possuirá um tempo de acesso menor se estes
quatro setores forem lidos um por cada cabeça sem necessitar mover
o conjunto. Caso contrário, se cada setor estiver em uma mesma face,
será necessário mover mais três vezes o conjunto das
cabeças, o que gastará mais tempo. Por esse motivo, dizemos
que o MBR e o setor de boot estão no mesmo cilindro. Sim, eles estão
em um mesmo cilindro, porém em trilhas diferentes: cada trilha está
em uma face diferente.
Para sabermos a capacidade total de urn disco rígido, devemos conhecer a sua geometria. A geometria de um disco rígido é formada pelo número de trilhas por face (ou cilindros), o número de faces (ou cabeças) e o número de setores por trilha. Multiplicando-se esses três valores, teremos o número total de setores do disco. Multiplicando-se o resultado por 512 (cada setor ainda comporta 512 bytes), teremos a capacidade total do disco rígido em bytes. Para sabermos o resultado em MB, deveremos dividir o resultado encontrado por 1.048.576, que é o valor em decimal de 1 MB . Para sabermos o resultado em GB, deveremos dividir o resultado encontrado por 1.073.741.824, que é o valor em decimal de 1 GB. Isso poderá causar um pouco de confusão, principalmente no caso de arredondamentos.
capacidade de armazenamento = número de trilhas x núrnero de setores por trilha x mírnero de faces do disco x 512
Vejamos um caso prático. O disco rígido Maxtor 7546AV tem em seu manual a indicação como "DISCO RÍGIDO DE 546 MB". Vamos ver se isso é correto. Sua geometria é 1.060 cilindros, 16 cabeças e 63 setores. Multiplicando-se tudo isso por 512, encontraremos 547.061.760 bytes. Rá! Um disco rígido de 547 MB, pensará você! NÃO! Na verdade, esse é um disco de 521,72 MB. A própria Maxtor, para evitar qualquer complicação legal, coloca em letras miúdas a frase "Maxtor define urn megabyte como 10exp6 ou um milhão de bytes". Ouanto maior o disco rígido, mais lonqe fica a capacidade "nominal" indicada pelo fabricante e a capacidade real do disco rígido.
Outro exemplo? O disco rígido Maxtor 7850AV possui a indicação (e é realmente vendido como) "DISCO RÍGIDO DE 850 MB". Vamos ver. Sua geometria é de 1.648 cilindros, 16 cabeças e 63 setores por trilha. Multiplicando-se tudo por 512, teremos 850.526.208 bytes, um incrível disco rígido de... 811,12 MB!
Algo que não era levado em conta nos discos flexíveis e que nos discos rígidos já começa a fazer uma certa diferença é o fato de as trilhas mais externas possuírem uma área maior do que uma trilha mais interna. Sendo assim, uma trilha mais externa pode ser formatada com um maior número de setores do que uma trilha mais interna. O conjunto formado pelas trilhas que possuem um mesmo número de setores é chamado de zona e os discos rígidos mais modernos permitem esse tipo de recurso que acabamos de descrever, chamado de setorização multizona (ZBR - Zone Bit Recording). A conversão do padrão de leitura entre as zonas é feita automaticamente pelo circuito controlador do disco rígido e é totalmente transparente ao usuário.
Pelo mesmo motivo de setores de trilhas mais internas serem menores do que setores de trilhas mais externas, possuíamos dois grande problemas. O primeiro era em relação ao campo magnético gerado pela cabeça de leitura/gravação. Ora, se fosse utilizada, em um setor de uma trilha mais interna, a mesma corrente elétrica que era utilizada em um setor de uma trilha mais externa, o campo magnético formado acabava por alterar dados em áreas adjacentes. A solução para isso era a utilização de um campo magnético menor em setores menores, de modo que não alterasse dados adjacentes. Esse método é conhecido como escrita reduzida (Reduced Write) e é definido um cilindro a partir do qual será utilizado.
Por outro lado, apesar da utilização de escrita reduzida, outro problema ocorria nos setores de trilhas mais internas. Como os dados tinham uma área menor para se acomodarem, por vezes uma carga magnética acabava por alterar o estado de outra. Um campo Norte muito próximo de outro campo Norte fazia com que os dois se repelissem, alterando o dado que ambos representavam, bem como a proximidade de um campo Sul com um campo Norte fazia com que houvesse atração, alterando os dados que os mesmos representavam da mesma forma. A solução para esse problema foi a adoção de um processo conhecido como pré-compensação de escrita (WPcom - Write Precompensation), que consiste em incrivelmente gravar os campos magnéticos já alterados sobre superfície magnética, de modo que a acomodação dos campos resulte no dado correto.
Tanto disquetes como discos rígidos possuem
dois tipos de formatação, sendo que nos disquetes não
há diferença tão essencial como quando nos referimos
a discos rígidos. Esses dois tipos de formatação podem
ser explicados da seguinte forma:
Antes da formatação
lógica, um disco rígido necessita da definição
da tabela de partição, para saber como será dividido,
além da escrita do MBR. Dessa forma, o processo de formatação
de um disco rígido seria:
Apesar de tudo, o disco rígido é um sistema extremamente rápido. E gira tão rápido que por vezes pode ser mais rápido do que o próprio microprocessador. E o que acontecerá quando o microprocessador pedir ao disco rígido dois setores contíguos? O primeiro será carregado para a memória, porém, quando o segundo estiver sob a cabeça de leitura/gravação, o microcomputador ainda não estará pronto para lê-lo. Como o disco é dinâmico, ele não parará à espera da prontidão do microcomputador. Quando o microcomputador estiver pronto, porém, o setor que ele queria já não estará posicionado sob a cabeça de leitura/gravação e, sendo assim, o microcomputador deverá esperar o disco girar completamente até que o setor desejado esteja sob a cabeça de leitura/gravação. E isso faz com que o desempenho caia, uma vez que o microcomputador ficará espaços de tempo fazendo nada, esperando o setor passar novamente sob a cabeça.
Uma maneira muito inteligente para se resolver isso é alterar-se o fator de interleave (intervalo), que diz a ordem física dos setores em uma trilha. Normaimente, para efeitos ilustrativos, dizemos que os setores em uma trilha são contíguos e seqüenciais, como no exemplo anterior. Um disco rígido com 17 setores por trilha teria os setores na ordem 1-2-3-4-5-6-7-8-9-10-11-12-1314-15-16-17. Em outras palavras, com fator de interleave 1:1.
Porém, com interleave 1:1, teriamos o problema da espera do microcomputador, pois ele não seria rápido o suficiente, em vista da velocidade de rotação do disco rígido. Nesse caso, talvez alterando-se a ordem dos setores em todas as trilhas do disco, o problema seria resolvido. Com os setores intercalados, teríamos algo como 1-9-2-10-3-11-4-12-5-13-6-14-7-15-8-16. Esse seria urn fator de interleave 2:1.
Nesse caso, na leitura de dois setores em seqüência, talvez o tempo que o próximo setor demore para passar sob a cabeça de leitura/gravação seja suficiente para o rnicrocomputador estar pronto para lë-lo.
Da mesma forma, o mesmo disco formatado com interleave 3:1 possuiria os setores na seqüência 1-7-13-2-8-14-3-9-15-4-10-16-5-11-17-6-12, e assim sucessivamente.
O fator de interleave é definido no momento da formatação em baixo nível. Discos rígidos que não possam ser formatados em baixo nível (como é o caso dos discos rígidos IDE) vêm de fábrica com fator de interleave 1:1, sendo feita compensação por hardware, através de uma técnica de cache de disco: o disco rígido lê todo o conteúdo de uma trilha e o armazena em urna memória, fazendo com que o micro leia os dados da memória, e não do disco.
Podemos alterar o fator de interleave sem necessidade de reformatação do disco rígido, através de algum programa específico como o Calibrate, parte integrante do Norton Utilities. Um programa desse nível compara o desempenho do microcomputador e o do sistema de disco rígido, apresentando o fator de interleave atual e qual seria o ideal.
Apesar de não fazer o menor sentido o ajuste de interleave em discos rígidos modernos (uma vez que vêm formatados de fábrica com interleave 1:1), é um procedimento indispensável no aumento de desempenho de um disco rígido mais antigo (padrão ST-506) instalado em um microcomputador mais rápido e moderno.
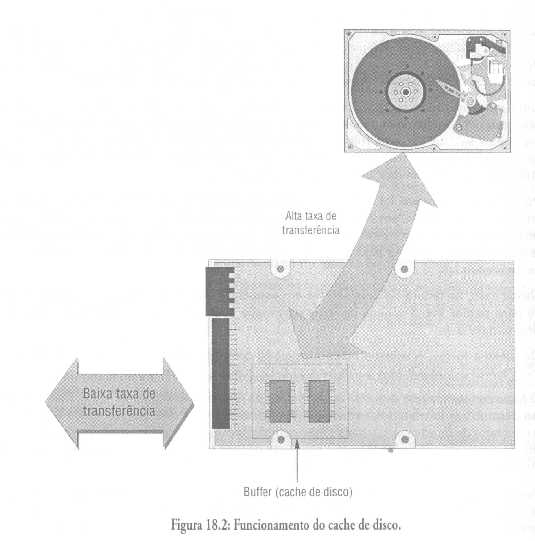
Os discos rígidos IDE possuem uma pequena memória. Ouando o sistema operacional lê um setor, o disco rígido lê a trilha inteira e armazena nessa memória. Como é muito provável que o próximo setor que o sistema operacional peça se encontre na mesrna trilha, o disco rígido não entregará ao microcomputador um setor recém-lido, mas os dados constantes nessa memória. Essa é uma técnica conhecida como buffer ou cache de disco (ver Figura 18.2).
Os discos rígidos modernos conseguem transportar mais de um setor por vez, o que faz com que o desempenho do micro aumente. Essa característica é conhecida como blockmode.
No setup de alguns micros há opções para habilitarmos o blockmode. Se esse for o caso de seu micro, habilite esta opção ou configure-a em "auto".
Os primeiros discos rígidos herdaram exatamente a mesma tecnologia utilizada em disquetes e em fitas magnéticas, conhecida como coated media (mídia coberta). Esse tipo de superfície magnética apresenta diversas desvantagens. As principais são uma relativa baixa densidade de gravação e, principalmente, a deterioração da superfície magnética.
Os discos rígidos que utilizavam o processo coated media sobre sua superfície magnética também apresentavam problemas com o passar do tempo. Os discos rígidos tinham uma tabela de erros que, de tempos em tempos, deveria ser atualizada de modo que incluísse os novos focos de erro sobre a superfície magnética. 0 circuito controlador proibia o conjunto de cabeças de acessar as trilhas constantes no mapa de erros (como limpar as cabeças de um disco rígido?). Esse processo de atualização da tabela de erros era feito no momento da formatação de baixo nível, urna vez que você deveria reformatar o disco baseado na nova tabela.
Hoje em dia, outro tipo de superfície magnética
é utilizado, num processo conhecido como plated
media (mídia laminada). Esse processo de início era
caríssimo, porém com os anos de utilização
seu custo caiu vertiginosamente. Hoje em dia todos os discos rígidos
se utilizarn desse processo, permitindo discos de altíssima capacidade
com alta confiabilidade em um mesmo espaço físico.
As informações a serem gravadas sobre a superfície magnética são digitais e a superfície magnética está preparada a armazenar somente campos magnéticos, como norte e sul. A princípio você poderia pensar que seria fácil: um "0" equivaleria a uma polarização "norte" na superfície magnética e um "1" a uma polarização "sul". No entanto, não podemos nos esquecer de que há marcações especiais a serem gravadas e que são transparentes ao usuário, como por exemplo "início de setor", "fim de setor" e dados de conferëncia de erros (ECC - Error Correction Check). Caso não existissem marcações desse tipo, dados poderiam ser confundidos facilmente: como diferenciar um "0" em particular desejado de um "0" qualquer existente na superfície magnética?
Por esse motivo, cada informação a ser gravada sobre a superfície magnética é codificada de maneira que signifique uma seqüëncia particular de campos norte-sul sobre a superfície magnética, de modo que não haja dúvida em relação ao dado pretendido. Esse esquema de codificação é chamado também de modulação.
Os primeiros discos rígidos utilizavam o mesmo tipo de modulação que os disquetes- MFM. Com o passar do tempo, viu-se que este tipo de modulação desperdiçava muito espaço do disco. Outro tipo de modulação começou a ser utilizado: o RLL (Run Length Limited-Comprimento de Percurso Limitado), que em um mesmo espaço físico consegue acomodar exatamente 50% mais dados.
Atualmente RLL e ARLL (Advanced RLL) ainda são os métodos de modulação utilizados. A simples troca do esquema de modulação já significava um aumento da capacidade de armazenamento.
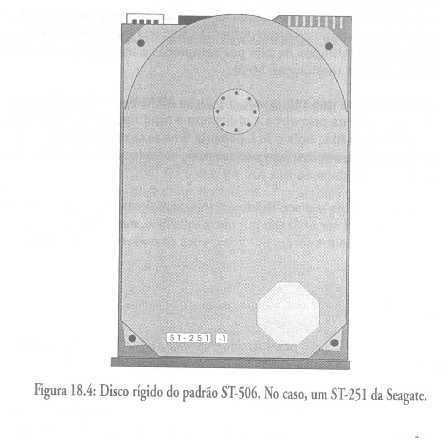
Quando os primeiros discos rígidos para os microcomputadores PC surgiram, juntamente com o PC XT e PC AT, só havia um grande fabricante de discos rígidos: Shugart Technologies atualmente chamada Seagate - e daí o acrônimo ST. Os números se referem aos modelos dos primeiros discos rígidos de 5 e 10 MB, respectivamente.
Funcionamento
Um disco rígido do padrão ST-506 deverá ser conectado a uma interface controladora ST-506. Esse tipo de disco rígido é burro e possui um tempo de acesso lento. Isso porque, assim como as unidades de disquete, é baseado no motor de passo para a movimentação do conjunto das cabeças. Isso significa que, caso o conjunto das cabeças se encontre sobre o cilindro zero, serão necessários 400 passos para a movimentação até o cilindro 400. E 400 passos significam 400 instruções independentes.
A interface controladora é quem realmente controla o disco rígido e ela tem muito trabalho. Todos os dados lidos pelo disco rígido são enviados à interface, porém ainda não "preparados" para uso. São enviados à interface tanto os dados em si quanto os sinais de sincronismo desses dados. Cabe à interface prepará-los, em um processo conhecido como separação de dados. E como erros ocorrem, principalmente perda de dados, a interface pede ao disco rígido uma releitura do dado, tornando lento o processo.
O nível de ruído é diretamente proporcional ao tamanho do cabo. E, como, nesse caso, o nível de ruído é problemático, por menor que seja o cabo, sempre haverá ruído, fazendo com que o desempenho desse sistema de disco rígido não seja dos melhores. A taxa de transferência fica em torno de 7,5 Mbps (Milhões de bits por segundo) se utilizada a modulação RLL ou em torno de 5 Mbps utilizando a modulação MFM.
Todos os discos rígidos que utilizavam o padrão MFM de modulação eram dos modelos ST-506 e ST-412, bem como os primeiros a utilizarem a modulação RLL. Na época fazia sentido dizer se o disco era MFM ou RLL, pois o RLL possuía uma taxa de transferência de dados maior, como acabamos de ver. Hoje em dia, isso não faz mais sentido, principalmente porque todos os discos rígidos utilizam a modulação RLL (ou ARLL).
Quem realmente controla o disco rígido é a interface. Uma vez formatado, um disco rígido desse padrão não conseguirá ser utilizado por outra interface, a não ser que seja reformatado por ela. Nesse caso, além de os dados serem perdidos, vocé só poderá utilizar a nova interface na qual o mesmo foi formatado.
Instalação
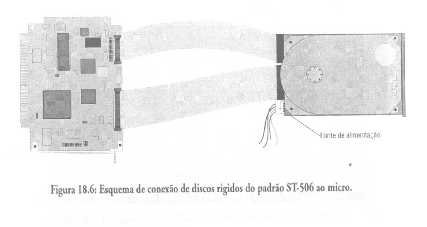
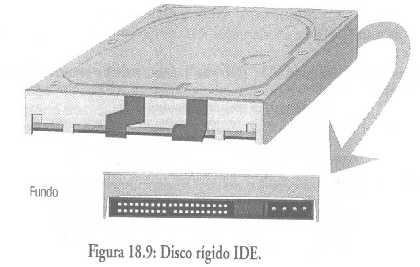
Os discos rígidos desse padrão possuem dois conectores: um conector de 34 vias, semelhante ao conector de unidades de disquete de 5 1/4" e um conector menor de 20 vias, utilizados para transmissão de dados e controle, respectivamente.
Já a interface possui três conectores: um de 34 vias, para ser conectado a todos os discos rígidos existentes através de um cabo paralelo. Assim como ocorria com os primeiras unidades de disquete, deverá haver algum meio de diferenciação de discos rígidos, o que é feito através de jumpers localizados no mesmo. Com nomenclaturas como IDO, IDl, ID2, etc., não é difícil descobrir que IDO será utilizada para o primeiro disco rígido, IDl, para o segundo e assim sucessivamente.

Um dos grandes erros é pensar que esse padrão de discos rígidos não pode ser utilizado em micros modernos. Ao avistar um disco rígido desse padrão um leígo logo exclama: "Ih! Um díscc rigido de XT!". Não. Esse não é um padrão de "disco rígido para XT". E1e foi desenvolvido à época: do XT, porém é um disco rígido, um periférico como outro qualquer que poderá ser conectado err qualquer tipo de microcomputador do padrão IBM.
ROM da Interface ST 506
Se não é a ROM do microcomputador que irá controlar esse tipo de disco rígido, como o microcomputador conseguirá acessá-lo? Obviamente a interface ST 506 possui uma ROM que ínstrui ao mícroprocessador como manipular com esse tipo de disco rígido. Essa ROM normalmente ocupa a posição de memória a partir de C8000, mas esse endereço pode ser alterado através de dois jumpers existentes na interface. Em microcomputadores AT, poderemos habilitar o shadow desta ROM, a fìm de aumentar um pouco o desempenho.
Talvez seja necessária a conexão de dois discos rígidos desse padrão utilizando interfaces próprias - uma vez que, formatado, esse disco rígido só pode ser acessado pela interface que o formatou. Como existirão duas interfaces com duas ROMs ocupando o mesmo endereço, haverá conflito e não funcionarão. Nesse caso deveremos alterar o endereço ocupado por uma das interfaces. A conferência poderá ser feita através do mapa de memória do programa Checkit.

Formatando Discos Rígidos ST 506 em Baixo Nível
A formatação de baixo nível é necessária nesse tipo de disco rígido, em especial devido ao problema da deterioração da camada magnética, que faz com que erros apareçam e devam ser registrados- pois a mídia magnética utiliza o processo coated media. O próprio fabricante fornece um mapa de erros afixado na tampa do disco rígido.
Existem algumas maneiras básicas de fazer a formatação em baixo nível nesse tipo de disco rígido: O Com o firmware da controladora de disco rígido. A ROM existente na interface possui um programa para se fazer este tipo de formatação. Para acessarmos esse firmware devemos utilizar o comando DEBUG e entrarmos a linha de comando G=C800:5 fENTER), ou conforme a área de memória em que esteja localizada a ROM da interface. Caso esteja em outro endereço, devemos entrar o endereço em forma de segmento e o offset "5", conforme já apresentado. O processo de formatação em si dependerá do firmware a ser utilizado. De uma maneira geral, é requisitada a geometria do disco rígido, o cilindro de escrita reduzida (reduced write) e o cilindro de pré-compensação de escrita (write precompensavion), bem como o fator de interleave e o mapa de erros.

Não se esqueça de, após formatar o disco rígido em baìxo nível, particioná-lo (com o comando FDISK) e formatá-lo em alto nível (com o comando FORMAT C:/S).
Este padrão foi criado de modo a suprir as deficiências do ST-506, seguindo o mesmo método de instalação física do padrão ST-506. Apesar de tudo, não se tornou popular.
A separação de dados, que antes era feita na interface, passou para o próprio disco rígido, aumentando-se a confiabilidade do sistema de disco rígido. Esse padrão permite uma taxa de transferência de dados máxima de 24 Mbps, além de possibilitar o controle de discos de maior capacidade, uma vez que permitia controlar discos rígidos com até 256 cabeças, ao contrário do padrão anterior que estava limitado a 16 cabeças.
Todos os dados de instalação física do padrão anterior são válidos aqui. Sua vida curta se deveu principalmente ao surgimento de novos padrões.
O SCSI (pronuncia-se scüzi) não é apenas um padrão de discos rígidos. É um padrão de ligação de periféricos em geral. Por esse motivo, iremos discutir discos rígidos desse padrão no próximo capítulo juntamente com os demais periféricos SCSI.
Introdução
Embora o padrão SCSI possa ser a solução real e final para subsistemas de disco rígido, ele é um padrão caro até hoje em dia. O host SCSI é caro e o disco SCSI também. No entanto, não devemos esquecer que não possuímos qualquer limite de capacidade (teoricamente podemos construir discos rígidos SCSI com capacidade infinita) e não temos problemas com ruído na comunicação da controladora com o disco rígido, já que todo o controle está localizado dentro do próprio disco rígido. Outra característica marcante do padrão SCSI é a sua taxa de transferência, como vocë poderá observar no próximo capítulo.
Quando a Compaq estava projetando o seu Compaq/386, ela estava determinada a criar um novo tipo de disco rígido que fosse mais barato que o SCSI e que pudesse ter uma capacidade de armazenamento mais elevada que os padrões existentes na época (ST-506 e ESDI). O grande problema em relação ao aumento de capacidade estava em relação ao ruído existente no caminho entre o disco rígido e a interface controladora, que fazia com que a interface pedisse diversas retransmissões de dados por divergëncia. Isso fazia com que discos construídos com a tecnologia ST-506 ou ESDI com maior capacidade fossem menos seguros e, principalmente, baixassem o rendimento na busca de uma quantidade muito grande de informações por vez.
A Western Digital foi a responsável por apresentar uma solução, aliás bem simples: se o problema é o ruído, vamos eliminá-lo, fazendo com que o cabo de comunicação entre o disco rígido e a interface controladora seja o menor possível. Essa empresa criou um disco rígido bem parecido com o ST-506 e ESDI só que a interface controladora estava integrada diretamente na mesma placa dos circuitos de controle do mecanismo do disco rígido - ou seja, no próprio disco rígido. Com isso, o problema de ruído foi simplesmente eliminado.
Essa tecnologia passou a ser
chamada apropriadamente de IDE (lntegrated Drive Electronics - Eletrônica
de Drive Integrada), pois a controladora está integrada ao próprio
disco rígido.
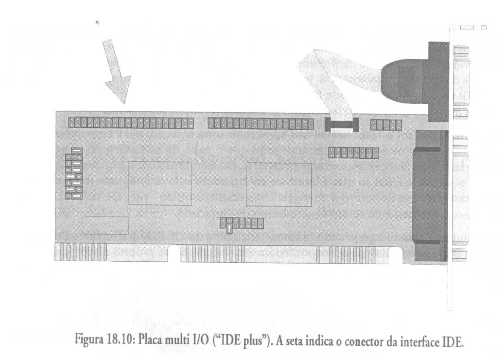
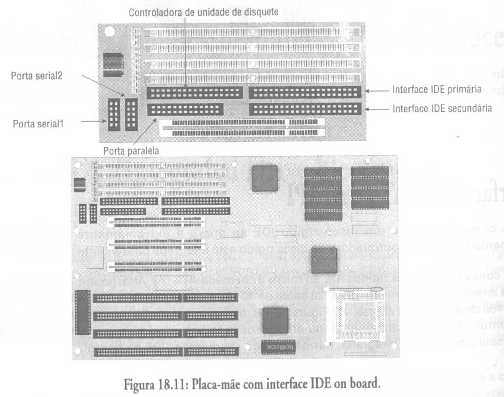
A conexão de discos rígidos IDE ao micro é chamada ATA (AT Attachment - Ligação AT) e é provida através de um conector para flat cable de 40 pinos, disponível em uma placa multi I/O (até micros 486 de arquitetura aberta, ver Figura 18.10), ou integrada diretamente à placa-mãe, o que é mais comum de ocorrer atualmente (ou em micros mais antigos "de marca"). Quando a placa mãe possui interface IDE integrada, normalmente a chamamos "IDE on board".
Funcionamento dos Discos Rígidos IDE
Havia ainda um grande problema em relação
ao motor de movimentação do conjunto das cabeças de
leitura/gravação. De nada adiantaria a tecnologia IDE se
o disco rígido continuasse burro. Era necessária a utilização
de um sistema de motor inteligente. Um motor diferente do lento e burro
rnotor de passo. Passou-se a utilizar um novo tipo
de motor, chamado voice coil. A idéia é simples: o
motor, de alguma forma, necessita de um sistema de localização.
No caso do motor de passo, era simples. Cada passo tinha exatamente a distância
entre uma trilha e outra. No caso dos discos rígidos
IDE, foram
acrescentados entre um cilindro e outro um sinal
analógico especial de orientação ao motor, chamado
servo. Há uma cabeça especial que lë o sinal servo.
Dessa forma, quando o conjunto de cabeças, localizado sobre o cilindro 0 e o disco rígido IDE. necessita mover-se até o cilindro 400, ele irá diretamente até o cilindro 400, através de uma só instrução "vá ao cilindro 400", ao contrário dos discos rígidos que utilizam motor de passo, que, nessa mesma situação, necessitariam de 400 comandos "pule para o próximo cilindro" (ou seja, "ande um passo para frente"). Nesse ponto, você já começa a compreender a diferença de desempenho.
Na verdade, os sinais de servo podem estar em uma mesma face de disco onde existam dados ou podem estar localizados em uma face totalmente destinada aos sinais de servo. Portanto, não é estranho existir um disco rígido de cinco lados (cabeças), mesmo sendo este um número ímpar: existem internamente três discos, ou seis lados. Porém, um lado é utilizado para a orientação do motor através dos sinais de servo.
Sem sombra de dúvida, a utilização do motor por atuação voice coil foi um passo importantíssimo para o desenvolvimento de dispositivos cada vez mais inteligentes e rápidos.
Formatação em Baixo Nível
Mas... e se formatarmos um disco rígido que utiliza atuação por voice coil em baixo nível? Adivinhal Apagaremos todos os sinais de servo, inutilizando o disco rígido permanentemente. Dessa forma, os discos rígidos IDE não podem ser formatados em baixo nível.
Discos rígidos mais rnodernos fingem estar
sendo formatados em baixo nível quando 0 usuário assim solicita.
O próprio disco rígido, por ser inteligente, corta o sinal
de formatação, apenas movimentando o conjunto de cabeças,
porém não forrnatando o disco. Mas não convém
arriscar e abusar da sorte. O disco rígido IDE não deve ser
formatado em baixo nível. E ponto final.
| Modo PIO Taxa de Transferência Conexão |
| Modo 1 5,2 MB/s ATA |
| Modo 2 8,3 MB/s ATA |
| Modo 3 11,1 MB/s Fast-ATA |
| Modo 4 16,6 MB/s Fast-ATA2 |
| Modo 5 22 MB/s Fast-ATA3 |
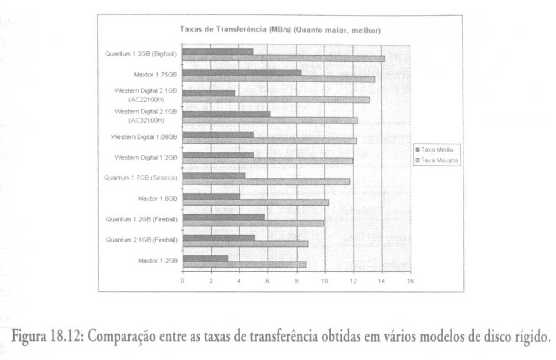
A taxa de transferëncia obtida na prática
depende muito do modelo de disco rígido. Para comprovarmos isso,
testamos, em nosso laboratório, diversos modelos de discos rígidos
das marcas mais conhecidas (TORRES, Gabriel. Teste o ritmo de seu HD. O
Dia Informática, Rio de Janeiro, 22 de agosto de 1997). Para isso,
utilizamos o programa CheckHD. Os resultados obtidos vocë confere
nas Figuras 18.2 (taxa de transferëncia) e 18.3 (tempo de acesso).

| Disco Rígido
Modelo
Buffer Blockmode Tempo
de Taxa Máxima Taxa Média
(KB) (setores) Acesso (ms) ( MB/s) ( MB/s) |
| Maxtor 1.2GB Maxtor 71260AT 256 16 18,5 8,65 3,15 |
| Maxtor 1.6GB Maxtor 7162AP 128 32 18 10,3 4,05 |
| Maxtor 1.75GB Maxtor 81750A2 256 16 17 13,55 8,35 |
| Quantum 1.2GB (Bigfoot) Bigfoot 1280A 87,5 8 16,5 14,25 5 |
| Quantum 1.2GB (Fireball) Fireball_TM1280A 76,5 16 10 9,9 5,75 |
| Quantum 1.7GB (Sirocco) Sirocco 1700A 75 8 10 11,75 4,4 |
| Quantum 2.1GB (Fireball) Fireball_TM2100A 76,5 16 9,5 8,8 5,05 |
| Western Digital 1.08GB WDC AC21000H 128 16 11 12,25 5 |
| Western Digital 1.2GB WDC AC21200H 128 16 11 11,95 5 |
| Western Digital 2.1GB WDC AC32100H 128 16 13 12,3 6,2 |
| Western Digital 2.1GB WDC AC22100H 128 16 13,5 13.15 3,7 |
| Modo DMA Bus Mastering Taxa de Transferência Conexão |
| Modo 0, single word 2,1 MB/s ATA |
| Modo 0, multi word 4,2 MB/s ATA |
| Modo 1, single word 4,2 MB/s ATA |
| Modo 2, multi word 8,3 MB/s ATA |
| Modo 1, multi word 13,3 MB/s Fast-ATA |
| Modo 2, multi word 16,6 MB/s Fast-ATA2 |
| Modo 3, multi word 33,3 MB/s Ultra-ATA |
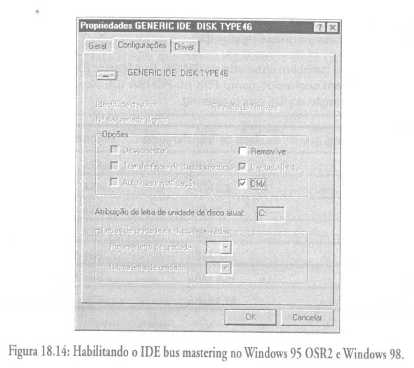
Se você tiver instalado um disco rígido de 2 GB que trabalhe com PIO modo 4, talvez se pergunte se há vantagem em utilizar o IDE bus mastering, já que mesmo utilizando o modo PIO ou o PIIX a taxa de transferência máxima será de 16,6 MB/s. A grande diferença será que no modo PIO quem controla a transferência de dados é o processador, enquanto, no bus rnaster, esse controle está no chipset.
Tanto o Windows 95 OSR2 quanto o Windows 98 possuem drivers de bus mastering. Entretanto, o IDE bus mastering não é habilitado automaticamente. Para habilitá-lo, você deverá, no Gerenciador de Dispositivos (ícone Sistema do Painel de Controle), dar um duplo clique no disco rígido (em Unidades de Disco), selecionando a seguir a guia Configurações. Basta você habilitar a caixa DMA (ver Figura 18.14).
O caso do Windows 95 é um pouco mais complicado, pois ele não possui drivers de bus mastering. Em geral, as placas-mãe vêm com um disquete que contém os drivers de bus mastering. Vocë poderá instalá-los. Para isso basta executar o arquivo exe presente no diretório WIN95 do disquete. Veja os detalhes da instalação no manual on-line (arquivo readme.txt ou equivalente).
Mesmo no Windows 95 OSR2 e no Windows 98, recomendamos a instalação dos drivers do fabricante, pois estes, em geral, apresentam desempenho superior.
1. Verifique se a unidade de CD-ROM está instalada na porta IDE
secundária.
2. Entre no editor de registro do windows 95 ( c:\windows\regedit.exe).
3.Na chave HKEY_LOCAL MACHINE/System/CurrentControlSet/Services/Class/hdc
você encontrará diversas pastas, como 0000, 0001, 0002,
0003, etc. Procure pela pasta que contiver a string "Secondary Bus
Master IDE Controller" ou similar.
4. Nesta pasta, altere o campo "PortDriver" para "ESDI 506.pdr" e o
campo "DriverDesc" para "Controlador IDE secundário".
O padrão Ultra-ATA permite
a transferência de dados a uma taxa de até 33,3 MB/s, sendo
a maior taxa atingida pelo padrão IDE hoje em dia. Para utilizar
o padrão Ultra-ATA, você deverã possuir:
Para instalar os drivers de bus mastering - que obrigatoriamente vêm em um disquete ou CD-ROM em conjunto com a placa-mãe -, basta seguir as instruções on-line (arquivo readme.txt ou equivalente). No Windows 9x basta você adicionar um novo hardware com disco ou então simplesmente executar o arquivo "exe" existente no diretório "WIN95" ou equivalente do disco.
Na Figura 18.15 vemos um micro com disco rígido Ultra-ATA corretamente configurado.

A maneira mais rápida de descobrir se o seu disco rígido é Ultra-ATA é através do quadro de configurações do micro, que aparece logo após o POST. Nesse quadro de configurações normalmente aparecem os discos rígidos instalados e, atualmente, o modo PIO em que o dìsco rígido opera. Por exemplo, um disco rígido IDE de 2 GB provavelmente aparecerá como "PIO4" ou "mode 4" no quadro de configurações. Discos rígidos Ultra-ATA aparecem como "UDMA" (ou outra sigla equivalente) no quadro de configurações.
O padrão IDE surgiu de uma necessidade e pelo esforço de doís fabricantes. A idéia inicía! não era torná-lo padrão, mas somente suprir necessidades imediatas. Nessa época, o BIOS dos PCs começava a ter um certo suporte a discos rígidos dos antigos padrões ST 506 e ESDI, através de sub-rotinas próprias para o tratamento de discos rígidos.
Combinando esse fator ao padrão IDE, fez com que coincidentemente o mesmo crescesse mais, tornando-o um padrão de fato. Sendo um periférico de primordial importância, seria normal que o microcomputador (em especial o BIOS) conseguisse trabalhar tão bem com o disco rígido como consegue com o vídeo.
Porém existem diversos tipos de disco rígido IDE de díversos fabricantes, e o BIOS necessitava saber como realmente acessar cada um deles. Isso passou a ser feito através do setup do microcomputador. A geometria (número de cilindros, cabeças e setores por trilha, além de algumas informações adicionais) do disco rígido IDE passou a ser entrada no setup, sendo gravada na memóría CMOS. Para o acesso aos discos rígidos desse padrão, o BIOS simplesmente consulta o conteúdo da memória CMOS para usar corretamente as sub-rotinas de tratamento de disco rígido que ele possui.
O BIOS não poderia trabalhar
com uma geometria ílimitada, uma vez que ele não é
ilimitado. Este limite foi fixado em 1.024 cilíndros, 255 cabeças
e 63 setores por trilha (1024 x 255 x 63). Teoricamente, poderíamos
trabalhar diretamente com díscos rígidos IDE com até
7,84 GB de capacidade (basta fazer as contas).
A utilização de tecnologias para a alta capacidade de armazenamento (em especial a tecnologia de laminação plated media) permitiu uma alta densidade de gravação por disco, o que acarretava discos rígidos com uma superfície magnética formatada com vários cilindros. Chegou a um ponto em que a quantidade de cilindros na qual a superfície magnética de um disco rígido IDE era formatada ultrapassava o limite de cilindros com que o BIOS era capaz de manipular. Não podemos esquecer que, uma vez formatada, a superfície magnética de um disco rígido IDE não poderia ser reformatada (formatação em baixo nível), por causa da existência dos servos, sinais de orientação ao motor de movimentação do conjunto das cabeças de leitura e gravação.
Por causa do limite do número de cilindros, discos rígidos IDE tiveram de trabalhar com um esquema de tradução de geometria. A geometria que é introduzida no setup do microcomputador é uma geometria falsa. Essa geometria - chamada geometria lógica - na verdade é um múltiplo equivalente da geometria na gual o disco rígido é realmente formatado - a geometria física.
Vamos dizer que um hipotético disco rígido
fosse construído com a seguinte geometria: 2.002 cilindros, duas
cabeças, 63 setores. Esse disco rígido, de 123,17 MB (basta
fazer as contas), não poderia ser acessado pelo BIOS do microcomputador.
Se inseríssemos tal geometria no setup do micro, o BIOS acessaria
este disco rígido como tendo 1.024 cilindros, duas cabeças,
63 setores, ou seja, como se fosse um disco rígido de 63 MB (pois
o número máximo de cilindros reconhecido pelo BIOS é
1.024).
Para resolver esse problema e conseguir acessar o disco rígido com a sua capacidade total, o disco rígido deveria ser acessado pelo BIOS com uma geometria compatível, dentro de seu limite. A controladora do disco rígido (que está integrada dentro do próprio) se encarrega de fazer a tradução entre a geometria entrada no setup e a geometria real com que o disco rígido foi fisicamente formatado (lembre-se de que a formatação física de discos IDE é feita na fábrica). Esse disco rígido poderia ser configurado como se tivesse 1.001 cilindros, quatro cabeças e 63 setores (que também resulta em uma capacidade de 123,17 MB), e o próprio disco rígido se encarrega de fazer a tradução geometria lógica - geometria física.
Isso permitiu que qualquer disco rígido IDE seja formatado com qualquer geometria lógica (a entrada no setup), desde que dê como resultado uma capacidade igual ou inferior ao disco rígido. Porém, uma vez formatado em alto nível (pelo sistema operacional) com uma geometria lógica, o disco rígido só será acessado com a mesma geometria. Portanto, é interessante utilizar a geometria lógica recomendada pelo fabricante ou então anotar a geometria sob a qual foi formatado no próprio corpo do disco rígido. Pode acontecer de um disco rígido IDE com dados ser trocado de microcomputador e passar a ser acessado com uma outra geometria, vindo a dar problemas alguns dias depois-quando então será tarde demais para recuperar os dados já perdidos.
A entrada da geometria do disco rígido no setup é feita ou através de um recurso conhecido como AUTO DETECTION (detecção automática) ou manualmente. Manualmente entramos os valores da geometria da seguinte forma:
Cyln Head WPcom LZone Sect Size Hard Disk C: Type: 47 = USER TYPE
Para Wpcom (pré-compensação de escrita), caso você não saiba o valor, entre o valor 65535 de modo que o disco rígido ignore esse parámetro. Como os discos rígidos IDE são inteligentes, o próprio disco rígido se encarrega de executar automaticamente a pré-compensação de escrita, bem como a escrita reduzida.
Já Lzone é o cilindro de estacionamento.
Devemos entrar o valor do último cilindro + 1. Utilizando o exemplo
anterior, o disco rígido possui 1.001 cilindros, ou seja, do cilindro
0 ao cilindro 1.000. O cilindro de estacionamento será 1.000 + 1
= 1.001. Portanto, basta entrar sempre o mesmo valor informado na coluna
Cyln. Não se iluda achando que o cilindro de estacionamento, por
possuir sempre o mesmo valor do número de cilindros do disco rígido,
possuirá dados. Ele está vazio.
O padrão ATA (o padrão de conexão de discos rígidos IDE ao micro) também tem limite de geometria. Um valor muito alto, 65.536 cilindros, 16 cabeças e 255 setores por trilha (65536 x 16 x 255). Isso significa que o padrão ATA teoricamente poderia acessar discos rígidos IDE com até 127,5 GB de capacidade, um limite quase 17 vezes maior do que o limite imposto pelo BIOS - que já era alto.
Na época em que discos rígidos IDE estavam começando a ser utilizados, ninguém estava dando muita bola para os limites que esse padrão apresentava, tanto pela parte do BIOS do microcomputador quanto pelo padrão de comunicação com o microcomputador.
No entanto, os discos rígidos IDE deveriam obedecer simultaneamente
aos limites do BIOS do microcomputador e do padrão de comunicação
do disco rígido. Apesar de o padrão ATA permitir mais de
1.024 cilindros, o BIOS não permite. Embora o BIOS permita até
255 cabeças, o padrão ATA só permite até 16
cabeças. Isso fez gerar um limite para discos rígidos IDE.
Discos rígidos IDE não poderiam ter uma geometria lógica
maior que 1.024 cilindros, 16 cabeças e 63 setores (1024 x 16 x
63). Isso traz uma capacidade-limite de 504 MB para discos rígidos
IDE.
| CILINDROS CABEÇAS SETORES CAPACIDADE MÁXIMA |
| BIOS 1.024 255 63 7,84 GB |
| ATA 65.536 16 255 127,5 GB |
| DISCO RÍGIDO 1.024 16 63 504 MB |
O sistema operacional achará que o seu disco rígido inteiro possui apenas 504 MB. Portanto, não pense que podemos dividir o disco rígido em duas ou mais partições menores, de modo a utilizar a capacidade total do mesmo.
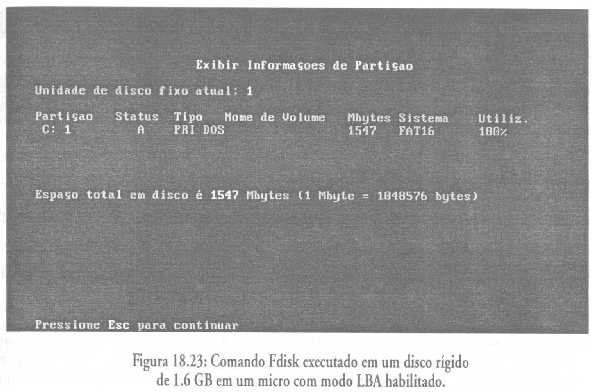
Para os nossos exemplos, utilizaremos o disco rígido Caviar 31600 (WDC31600), da Western Digital (capacidade nominal 1,6 GB, capacidade real 1,5 GB).
Depois que ele estiver corretamente instalado (veremos mais adiante como é feita a instalação física) e com a geometria devidamente configurada no setup do micro, gostaríamos de particionar e formatar esse disco rígido para utilização do MS-DOS ou do Windows 9x. No entanto, ao particionarmos o mesmo, o sistema operacional achou que o disco era de apenas 504 MB.

Obviamente a formatação do disco rígido procedeu da mesma forma : tendo sido criado uma só partição de 504 MB, o disco rígido foi formatado como tendo apenas 504 MB.

Se o seu micro não possui o modo LBA, você pode instalar discos rígidos maiores que 504 MB utilizando um programa formatador especial que acompanha o próprio disco rígido. Além de particionar e formatar o disco, o programa irá instalar um driver especial de acesso, de modo que o sistema operacional consiga acessar o disco rígido com a sua capacidade total .
Note que em micros modernos não há a necessidade de utilização de nenhum tipo de programa matador especial, já que o BIOS possui o modo LBA, permitindo o acesso a discos rígido IDE de até 7,84 GB sem maiores problemas. Essa solução se aplica, portanto, a micros antigos (386s e 486s) sem modo LBA (por exemplo, instalar um disco rígido de 1.2 GB em um micro antigo).
A primeira providência é conseguir o
programa formatador especial. Esse programa pode -conseguido através
de uma das seguintes formas:
De posse do programa formatador especial, o próximo passo é apagar as partições pré-existentes no disco rígido (criadas descuidadamente em tentativas frustadas de formatação do disco rígido). Isto pode ser feito com o comando Fdisk, utilizando a opção 3, "Excluir Partição do DOS ou Unidade Lógica do DOS". A seguir, basta executar o programa formatador especial. Não se esqueça de que o disquete deverá ser de boot (para copiar o sistema operacional para este disquete, utilize o comanclo Sys a:).
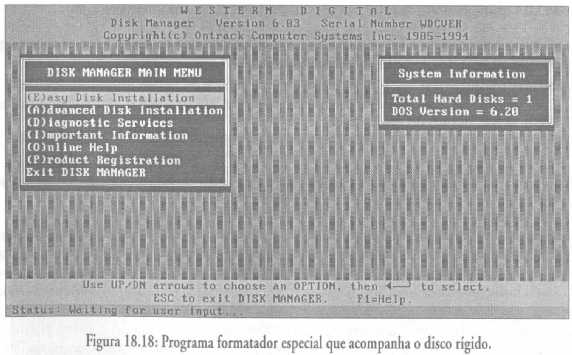
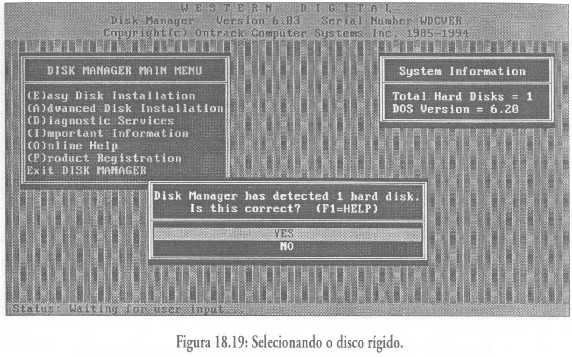
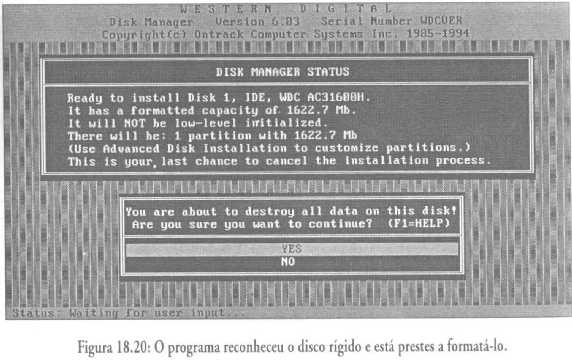
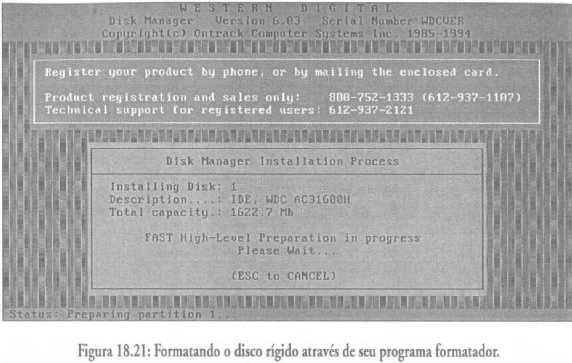
A seguir, basta seguir as informações
apresentadas pelo programa formatador. As Figuras 18.18 a 18.22 mostram
a seqüência de formatação de um disco rígido
Western Digital de 1.6 GB através de seu programa formatador.

Se você formatou um disco rígido com programa formatador especial conforme descrito, você deverá estar ciente de alguns detalhes. Após o programa formatar e particionar o disco rígido, ele instala um driver de acesso ao disco rígido para que o sistema operacional consiga acessá-lo.
Há dois tipos de driver de acesso: os que são gravados no MBR do disco rígido (método do pela maioria dos programas formatadores) e os que são externos ao MBR (método utilizado somente pelo programa formatador dos discos rígidos Quantum).
Em ambos os casos, você deverá deixar a opção de seqüência de boot em "C, A" no Setup micro, evitando que você dê um boot por disquete. Se você der um boot por disquete, você não conseguirá acessar o disco rígido (ou pior, terá acesso parcial, o que permitirá que dados sejam corrompidos).
Para você dar um boot por disquete, você deverá ter o driver de acesso carregado em memória. drivers que são carregados através do MBR (a maioria), basta apertar uma tecla específica (normalmente a barra de espaço; a tecla que deverá ser pressionada aparece escrito na tela) para que o boot seja dado por disquete, mantendo o driver de acesso na memória. Isso faz com que você consiga dar boot por um disquete e, ao mesmo tempo, ter acesso completo ao disco rígido- como se não houvesse nenhnm driver de acesso.
No caso do Programa formatador utilizado por discos rígidos Quantum, o driver é externo e é carregado através da primeira linha do Config.sys, que obrigatoriamente deverá ser:
DEVICE=C:\IDE DOS.SYS
Para preparar um disquete de boot em micros com disco rígido Ouantum formatados através de Irama especial, você deverá dar boot com o disco rígido e executar a seguinte seqüência de comandos:
Format a:/s
Copy c:\command.com a:\
Copy c:\ide_dos.sys a:\
Edit a:\config.sys
O último comando criará um Config.sys
no disquete de boot. Coloque como único comando DEVICE=C:\IDE DOS.SYS.
Além disso, o acesso a disco 32 bits do Windows
3.x ficará desabilitado; o Windows 9x trabalhará em
modo de compatibilidade. Isso ocorrerá porque o Windows não
poderá utilizar suas sub-rotinas de acesso ao disco rígido
recompiladas para modo protegido para acessar o disco rígido, já
que haverá um driver desempenhando esse papel.
Há uma alternativa muito importante: instalar o driver de acesso a disco 32 bits do programa formatador no Windows para que o micro possa utilizar este método de acesso, aumentando o desempenho . Para isso, no disquete do programa formatador, execute o único programa para Windows que há (leia o arquivo readme.txt ou equivalente para mais detalhes).
No caso do Windows 9x, a maioria dos programas formatadores
não possui driver de 32 bits para esse sistema operacional, ou seja,
o modo de compatibilidade é quase inevitável.
Corno a comunicação entre o microcomputador e o disco rígido é feita sob um padrão que comporta uma capacidade de até 127,65 GB diretamente, teoricamente o lìmite de 7,84 MB do BIOS não apresentaria qualquer problema. No entanto, ao nos depararmos com os parâmetros que regem tais capacidades, surgiu um limite de 504 MB-tanto o padrão ATA quanto o BIOS se baseiam em valores geométricos (cilindros x cabeças x setores).
Para ler um determinado setor do disco rígido, é necessário saber em que cilindro o mesmo se encontra, em que face (cabeça) e qual o setor dentro da trilha. Ouando o BIOS pede um determinado setor ao disco rígido, é nesse formato que tal setor é requisitado. Por isso é que temos de respeitar os limites geométricos tanto do padrão ATA quanto do BIOS.
No entanto, poderiamos numerar os setores de um disco rígido seqüencialmente ao invés da tríade Cilindro x Cabeça x Setor. Assim, um determinado setor seria conhecido pelo seu número de ordem dentro do disco rígido. O BIOS passaria a pedir o setor 1000 em vez da posição física cilindro x cabeça x setor em que o mesmo se encontra - sem limitação de valores geométricos. Esse esquema de endereçamento é conhecido como LBA (Logical Block Addressing - Endereçamento Lógico de Setores).
O modo LBA surgiu juntamente com o padrão IDE avançado, no final de 1993. Com o modo LBA estamos presos à capacidade do BIOS do micro, ou seja, 7,84 GB.
Para que um disco rígido maior que 504 MB
possa ser reconhecido com sua capacidade total, o BIOS do micro deverá
permitir o modo LBA; caso contrário, deveremos utilizar um programa
formatador especial, como vimos. O particionamento e formatação
são feitos como em outro disco rígido qualquer. Não
há a necessidade alguma de utilização de programas
instaladores. A geometria entrada no setup é a geometria informada
pelo fabricante do disco rígido.
A maneira como o modo LBA é habilitado no
setup varia ligeiramente conforme o fabricante da BIOS do microcomputador.
Como atualmente possuimos doìs grande fabricantes - Award e AMI
- daremos nossos exemplos baseados nesses dois fabricantes.
No setup dos micros com BIOS Award, uma nova coluna foi adicionada à geometria do disco rígido; Mode.
47 = USER TYPE Cyln Head WPcom LZone Sect Size Mode
Essa coluna pode assumir trës valores:
Mesmo com um layout mais apresentável, através
de janelas similares a do Windows, o setup das BIOS AMI mais modernas (WINBIOS)
é bastante complicado, devido ao grande número de opções
de configuração que foram acrescentadas. A habilitação
do modo LBA está completamente desconexa do setup básico,
o que facilita bastante o usuário no caso do BIOS Award. A habilitação
do modo LBA está em setup avançado, em opções
similares ou iguais às apresentadas abaixo:
A instalação do disco rígido é relativamente simples e deve ser feita nos seguintes passos:
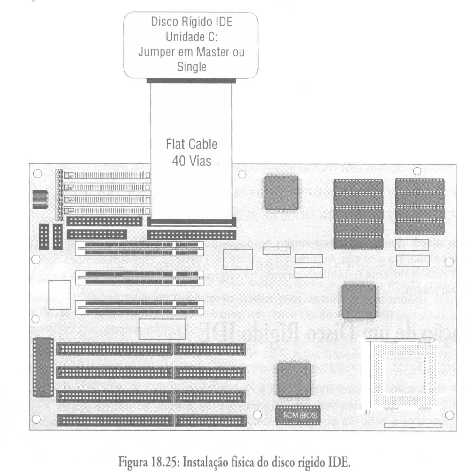
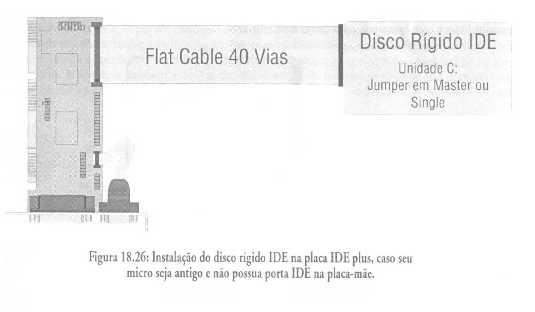
1. Instalação física do disco rígido ao micro, através da conexão do flat c:able de 40 vias. Essa conexão será feita diretamente na placa-mãe, conforme ilustra a Figura 18.25. Encaixe o cabo na porta IDE primária. Caso sua placa-mãe não possua porta IDE, o disco rígido será conectado ao micro através de uma placa multi I/O, mais conhecida como "IDE plus" (ver Figura 18.26). Além do flat cable, você deverá conectar um dos plugs da fonte de alimentação ao disco rígido.
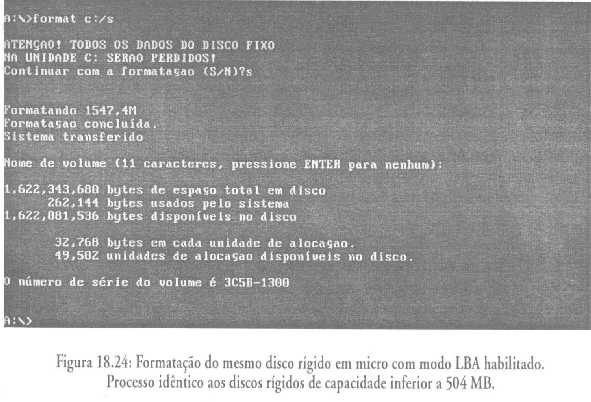
3. A seguir, se o disco estiver "virgem", basta
instalar o sistema operacional (basicamente utilizando o comando
Fdisk e, a seguir, Format c:/s). No caso de discos rígidos
maiores que 504 MB instalados em micros que não possuem o
modo LBA, você deverá utilizar um programa formatador
especial, conforme descrito em "Driver de acesso para micros antigos"
A Maneira Tradicional
Antigamente só havia uma única porta IDE no micro, disponível através de uma interface Multi-I/O ("IDE plus") ou então na própria placa-mãe, no caso dos micros "de marca". Para conectarmos dois discos rígidos nessa única porta, havia um problema. Como cada disco rígido possui uma controladora embutida, as duas controladoras entravam em conflito, disputando quem iria controlar a comunicação com o micro. Para resolver esse problema, bastava desabilitar a controladora de um dos discos rígidos, fazendo com que um dos discos rígidos controlasse a comunicação com o micro.
O disco rígido que estivesse controlando a comunicação seria o disco rígido mestre (master), enquanto o disco rígido controlado, o escravo (slave). O boot será dado sempre pelo discos rígido rnestre (que será a unidade C:). O disco rígido escravo será a unidade D:. Caso os discos rígidos tenham mais de uma partição, as partições estendidas serão acessadas a partir de E:. Por exemplo, se vocë só tinha um único disco rígido com duas partiçóes (C: e D:), quando você instalar um segundo disco rígido a partição D: do primeiro disco rígido será acessada como E:, pois o disco slave será obrigatoriamente a unidade D:.
Tradicionalmente, todo dispositivo IDE (incluindo unidades de CD-ROM, unidades Zip drive IDE, etc.) tem um jumper de configuração master/slave, conforme você pode observar na Figura 18.27.
Esse jumper habilita ou desahilita a comunicação da controladora do disco rígido (lembre-se de que a controladora está integrada ao próprio disco rigido).

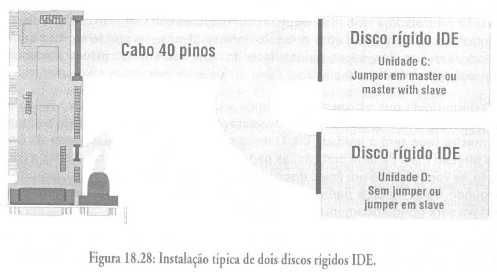
Atualmente, a estrutura master/slave não é a melhor forma de se instalar mais de um disco rígido ao micro. Se você instalar dois discos rígidos de gerações diferentes no esquema apresentado na Figura 18.28, o micro perderá desempenho (e muito).
Como você pode bem observar, os dois discos rígidos utilizam o mesmo cabo para se conectarem ao micro. Isso significa que somente um disco rígido poderá "falar" com o micro de cada vez. Imagine a seguinte situação: um micro com um disco rígido de 2 GB como "master" e um de 120 MB como "slave". O que ocorre? Tradicionalmente, nada de mais, uma instalação corriqueira de dois discos rígidos. Ledo engano. O disco master trabalhará em PIO modo 4, enquanto o slave em PIO modo 1. Ora, toda a vez em que o dísco slave for transferir dados com o mìcro, a taxa de transferëncia do cabo cairá de 16,6 MB/s para 5,2 MB/s. Como só um disco pode se comunicar com o micro por vez, enquanto o disco lento estiver se comunicando com o micro, o disco rápido terá de esperar. Sua espera será longa, pois o disco slave desta situação é muito lento (ele demorará um bocado para transferir qualquer coisa). Resultado: queda de desempenho, perceptível pelo usuário.
A situação de instalar um disco rígido mais lento como master é ainda pior. Veja a sítuação: o disco rígido de 120 MB como master, trabalhando em PIO modo 1, e nosso disco de 2 GB como slave, trabalhando em PIO modo 4. Como será o disco de 120 MB que obrigatoriamente dará o boot e muito provavelmente conterá o sistema operacional, a taxa de transferëncia do disco rígído com o micro será muito lenta, mesmo tendo um disco rápido instalado.
A solução é clara: não instale discos rígidos que possuam modo PIO diferentes no regime master/slavel Afìnal, para que vocë quer ganhar 120 MB a mais se vocë já tem um disco rígido de 2 GB?
Mesmo doís discos rígidos de mesma
geração (com o mesmo modo PIO) não devem ser instalados
hoje em dia, utilizando-se a estrutura master/slave. Apesar de aparentemente
não haver queda de desempenho, os dois discos rígidos não
poderão ser acessados ao mesmo tempo, já que estarão
compartilhando o mesmo cabo. Atualmente é possível fazer
com que o micro acesse dois discos rígidos ao mesmo tempo, como
veremos a seguir.
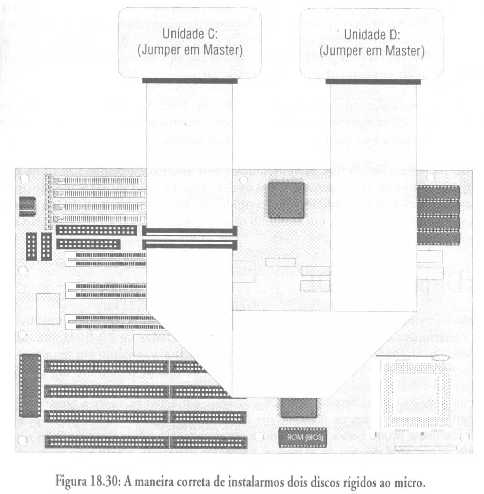
Atualmente toda a placa-mãe
possui duas portas IDE (uma primária e outra secundária),
o que permite a conexão de até quatro dispositivos IDE (dois
por porta). Se vocë estiver pensando em instalar dois discos
rígidos em um mesmo micro, que tal instalar um na porta IDE primária
e outro na secundária? Veja as vantagens:
A instalação de nsais de dois discos rígidos IDE obrigatoriamente necessitará de que, pelo menos, um par utilize a estrutura master/slave. No caso de quatro discos rígidos IDE, não há como fugir: todos utilizarão a estrutura rnaster/slave. Procure ao menos instalar discos rígidos que tenham o rnesrno modo PIO na mesma porta: discos rígidos de alto desempenho na porta primária e discos rígidos de haixo desempenho na porta secundária.
No caso da instalação de três discos rígidos (e mais nenhum outro dispositivo IDE), recomendamos que o disco rígido principal (aquele que contém o sistema operacional) seja instalado sozinho na porta primária e os outros dois na porta secundária, na estrutura master/slave.
No caso da instalação de três discos rígidos e um quarto dìspositivo IDE (uma unidade de CD-ROM IDE, por exemplo), recomendamos que os dois discos rígidos de desempenho mais elevado sejam instalados na porta primária e o disco rígido de desempenho mais baixo seja instalado como master na porta secundária, em conjunto com a unidade de CD-ROM (ou outro dispositivo IDE) que deverá ser configurada como slave.
Não são só os discos rígidos que se beneficiam da tecnologia IDE. Outros dispositivos tambérn podem ser construídos utilizando esta tecnologia, como unidades de CD-ROM, gravadores CD-R IDE, Zip drives IDE, Unidades Super Disk LS-120, etc. A principal vantagem em se utilizar a conexão ATAPI é o baixo custo, já que todos os micros possuem ao menos uma porta IDE disponível.
Na instalação de outros dispositivos IDE ao micro, o mais importante a observar é a questão do desempenho. Quase todos os dispositivos IDE que não sejam discos rígidos possuem uma taxa de transferéncia muito baixa, ocorrendo o mesmo problema de desempenho que havia na instalação de dois discos rígidos de gerações diferentes utilizando a estrutura master/slave.
Muitos técnicos sem a devida formação instalam unidades de CD-ROM IDE (e outros dispositivos IDE) como slave do disco rígido instalado na porta IDE primária. Basta lernbrar, por exernplo. que uma unidade de CD-ROM 33x possui uma taxa de transferência nominal de 4,9 MB/s (33 x 150 KB/s /1.024) enquanto um disco rígido trabalhando em PIO modo 4 possui uma taxa de transferëncia nominal de 16,6 MB/s (imagine o caso de um disco rígido Ultra-ATA, onde sua taxa máxima é de 33,3 MB/s!). A instalação de uma unidade de CD-ROM como slave do disco rígido irá comprometer o desempenho do micro de forma pior do que nosso exemplo anterior. No caso de unidades mais lentas (4x, 8x, 16x, etc.) o problema é pior ainda.
No caso da instalação da unidade de CD-ROM como slave do disco rígido instalado na porta IDE primária há ainda um problema muito mais grave. Há alguns jogos de computador (FIFA Soccer, Time Commando, etc.) que acessam o disco rígido ao mesmo tempo em que acessam a unidade de CD-ROM. Não é preciso dizer que, se eles estiverem instalados em urn mesrno cabo, o jogo irá "travar" ou apresentará "quebras" em suas animações.
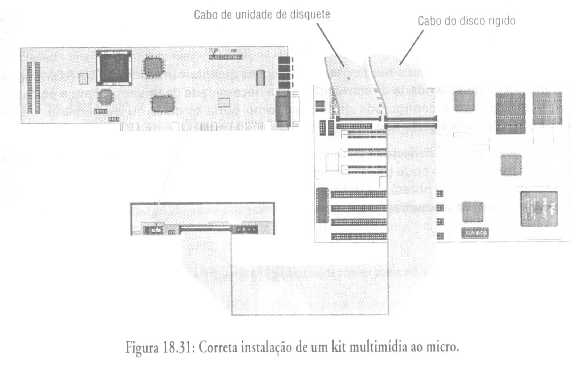
Alguns kits multimídia trazem em sua placa
de som uma porta IDE, para a instalação da unidade de CD-ROM.
Esse procedimento tinha em vista os micros antigos (386s e primeiros 486s)
que não possuíam duas portas IDE na placa-mãe. No
caso da instalação dessa placa de som em um micro moderno,
você deverá instalar a unidade de CD-ROM na porta secundária
da placa-mãe, mesmo a placa de som possuindo uma porta IDE (a Figura
18.31 mostra essa instalação), por diversos motivos: