
CHRIS' ROBOTICS PAGE
Hi and welcome to Chris' robotics page.
I build robots based on the LEGO�DACTA robotics products.
My current project is a quality testing machine that could be implemented into a manufacturing environment.
The blocks on the right represent the "product" that has just been manufactured. It slides down on to the conveyor belt and is tested by the light sensor to ensure it is the correct size.

When the sensor detects a block that is too large, the arm swings into action to remove it.

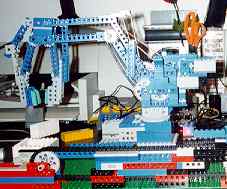
The claw has four "fingers" each with a rubber gripper on it. It closes on the block with a firm grip.
Since this photo was taken,�I have added a pressure sensor to the claw, so it can provide feedback about objects being held.
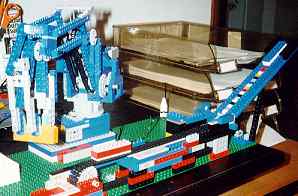
Once the block has been grabbed by the claw, the base swings it towards the scrap heap.
Upon arriving back at the scrap heap, the arm drops the faulty part into the heap. The conveyor brings down the next block, and the process continues.
The biggest struggle with this project has been getting it to repeat the operation indefinitely. Due to a limit of only 1 angle sensor (I'm saving up for more!), I've had to add a "recalibration" routine (My friend Harold, and a bunch of people off the net helped with this). After a certain number of executions it recalibrates the arm, so that it continues to operate effectively.
I've recently written a routine that moves the robot randomly. This is quite useless, but it did allow me to learn a few programming tricks in order to stop the arm moving outside it's tolerances. Plus it is fun watching something that normally follows explicit instructions behaving in an unpredictable way.
Future ideas for projects include a coffee making machine.
![]()
This page is dedicated to Jeremy Steward from DoFA for his unwavering faith in this project. Jeremy has closely followed my progress since the days when all I had was a blank sheet of paper with "robot" written at the top.
![]() �BACK
to Chris' Homepage����������������������������������
�BACK
to Chris' Homepage���������������������������������� �EMAIL
Chris
�EMAIL
Chris
You are visitor number: